

11. Опоры гироскопических приборов
11.1. Основные требования к опорам и их типы
Рассмотрение работы гироприборов свидетельствует о том, что следует различать опоры по внутренней оси подвеса, т.е. опоры ротора гироскопа, и опоры по промежу- точной и внешней осям, поскольку они работают в различных условиях и по-разному влияют на характеристики прибора.
Опоры ротора работают в условиях весьма значительных скоростей вращения ротора и
потому главные требования к ним - износоустойчивость. Что же касается вредных момен- тов в этих опорах, то они обусловливают нагрузку гиромотора, т.е. приводят к энергети- ческим затратам, но не влияют на точность работы прибора. В качестве опор ротора обычно используются специально разработанные для гироприборов шарикоподшипники. Однако, длительной непрерывной работы (в течение нескольких суток, лет) шарикопод- шипники не выдерживают. В этих случаях используются газо- и гидродинамические опо- ры. Они представляют собой две, например, полусферические поверхности (одна из них принадлежит конструкции ротора, другая - конструкции кожуха), на одной из которых выполнены профилированные канавки. Благодаря им при разгоне ротора происходит засасывание воздуха или жидкости и образуется зазор между двумя полусферами, пред-
ставляющий собой воздушную или жидкостную "подушку". При этом в разогнанном приборе соприкасание полусфер и истирание их поверхностей отсутствуют.
Опоры по промежуточной и внешней осям подвеса работают в более легких по срав- нению с опорами ротора условиях по износу, хотя они, как и опоры ротора, должны вы- держивать эксплуатационные нагрузки (удары, вибрации). Но опоры по промежуточной оси, а в некоторых случаях и по внешней (как это имеет место, например, в случае гиро- орбитанта), существенно влияют на точность приборов. Действительно, как было показа- но выше, вредный момент, действующий по промежуточной оси, вызывает "уход" гиро- скопа, т.е. накапливающуюся во времени ошибку. Эта ошибка является основной харак- теристикой гироприбора, и можно сказать, что центральной проблемой прикладной ги- роскопии была и остается проблема создания опоры с минимальным трением. К настоя- щему времени разработано несколько типов опор; из них заслуживают внимания сле- дующие:
- шарикоподшипниковая;
- упругая;
- поплавковая;
- газо- и гидростатическая;
- электростатическая;
- магнитная.
Шарикоподшипниковая опора используется только в приборах невысокой точности.
Понятие об упругой и поплавковой опоре (подвесе) было дано выше при описании
ВРГ, ДНГ, ПИГ.
Ниже кратко описываются остальные из перечисленных типов опор.
11.2. Газо- и гидростатическая опоры
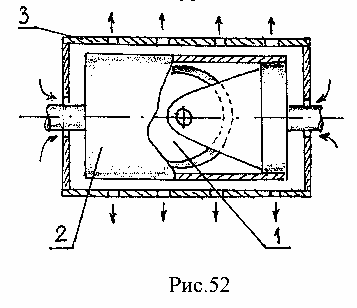
и создает воздушную "подушку". Выходит воздух через калиброванные отверстия - со- пла. Таким образом, рубашка, являющаяся по существу внешним кольцом карданова подвеса, и кожух - внутреннее кольцо под- веса - благодаря воздушной "подушке" не со- прикасаются, и трение в опоре обусловливает- ся только трением о воздух и внутри него. Расход нагнетаемого воздуха достаточно мал, и нагнетание обеспечивается микроком- прессором, входящим в состав прибора, или выполненного в виде отдельного блока, пи- тающего несколько приборов.
Гироприборы, использующие газостатический подвес, характеризуются высокой точностью и потому они, наряду с поплавковыми приборами, широко применяются в высокоточных системах инерциальной навигации.
Вместо воздуха в описанной выше конструкции может использоваться жидкость (гид- ростатическая опора), что позволяет увеличить поддерживающую способность опоры и благодаря этому расширить диапазон допустимых эксплуатационных нагрузок. На пер- вый взгляд, описанная гидростатическая опора сходна с поплавковой, которую также можно отнести к гидростатической. Однако, между ними есть существенное различие. В поплавковой опоре поддерживающее усилие создается выталкивающей (архимедовой) силой и камневыми опорами; в рассмотренном выше подвесе - за счет перераспределе- ния давлений в текущей жидкости при изменении зазора между кожухом и рубашкой. Именно: при увеличении зазора давление падает, при уменьшении - увеличивается, что заставляет кожух занять устойчивое положение с равным по всей боковой поверхности кожуха зазором.