

3.2. Невозмущаемый маятник
Как уже отмечалось, в большом числе случаев, в частности, для объектов, переме- щающихся в окрестности поверхности Земли, требуется определить их ориентацию отно- сительно системы координат, связанной с плоскостью местного горизонта - так называе- мой местной горизонтальной системы координат. Строится эта система координат следующим образом (рис.18). Ее начало О находится в точке пересечения с поверхно- стью Земли радиуса-вектора "центр Земли - объект" (в рамках рассматриваемых задач Землю допустимо считать шаром). Плоскость О г г совпадает с плоскостью горизонта в точке О, при этом ось О г ориентирована на Север, ось О г - на Восток. Ось О г совпа- дает с вертикалью в точке О. В ряде случаев удобнее пользоваться местной горизон- тальной системой координат, ориентированной в направлении движения, т.е. отли- чающейся от описанной тем, что ось О г направлена не на Север, а в ту же сторону, что и продольная ось объекта.
Очевидно, что введенные системы координат не являются инерциальными. Они
вращаются, причем вращение обусловливается двумя причинами: поступательным дви- жением объекта относительно Земли и вращением Земли. Вследствие движения объекта составляющие угловой скорости систем координат по их же осям О г,О г, как нетрудно видеть,
ux Vh / R, uh
Vx / R, (35)

Эти формулы потребуются ниже.
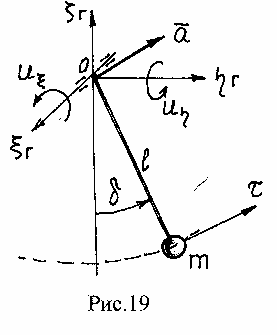
Уже отмечалось, что строить плоскость ме- стного горизонта или, что то же, направ- ление текущей вертикали гироскоп не способен и потому требуются иные устройства. Про- стейшим из них является маятник. Если точка подвеса маятника неподвижна относительно Земли, то маятник после успокоения колебаний установится в направлении линии отвеса, т.е. местной вертикали. Но если точка подвеса дви- жется с ускорением, а это имеет место при ис- пользовании маятника на подвижном объекте, то его положение в общем случае не будет сов- падать с вертикалью, но будет составлять с ней
 некоторый
угол (рис.19).
Выведем
уравнение
для
определения
этого
угла,
полагая,
для
конкретности,
что ось качания маятника совпадает
с
осью
O
г местной горизон-
тальной
системы
координат.
Пусть
m
-
масса
маятника,
l
-
его
длина,
a
-
абсолютное
ускорение
объекта.
Проекция
абсолютного
ускорения
массы
m
на
направление ,
каса-
тельное
к
ее
траектории,
равна
некоторый
угол (рис.19).
Выведем
уравнение
для
определения
этого
угла,
полагая,
для
конкретности,
что ось качания маятника совпадает
с
осью
O
г местной горизон-
тальной
системы
координат.
Пусть
m
-
масса
маятника,
l
-
его
длина,
a
-
абсолютное
ускорение
объекта.
Проекция
абсолютного
ускорения
массы
m
на
направление ,
каса-
тельное
к
ее
траектории,
равна
at (d&&
u&x )l
(производной от пренебрегаем вследствие ее малости).
екции на имеет вид
m at
(d&&
u&x )l
m gt ,
где g - проекция ускорения силы притяжения
Земли на . Отсюда имеем
d&&
u&x l
W&t .
&
Здесь
W&t - проекция кажущегося ускоре-
ния точки подвеса (объекта) на , которое при малом равно
W&t
W&h
W&z d . (37)
Подставляя эту формулу в (36), получим
d&&
l 1W&z d
(u&x
l 1Wh ) . (38)
Таким образом, если маятник помещен на подвижный объект, то он строит вертикаль с ошибкой, величина которой определяется правой частью уравнения (38). Возникает весьма важный для практики вопрос: можно ли подобрать параметры маятника так, чтобы исключить эту ошибку? Положительный ответ на этот вопрос был дан еще на заре прикладной гироскопии немецким ученым М. Шулером.
Чтобы получить этот результат, преобразуем величину в правой части уравнения
(38), используя соотношение (35) для u
V
R
l
h
l 1W&h
1 & 1W&h
(l 1
R 1)W&h . (39)
Здесь принят во внимание тот факт, что проекции на горизонтальную ось абсолютно-
го и кажущегося ускорений равны, ибо g =0.
Из (39) вытекает, что если длина математического маятника l равна радиусу Земли
R, то маятник не реагирует на движение объекта. Маятник с указанным свойством на- зывается невозмущаемым. (Заметим, что полученный результат интуитивно очевиден: если масса m находится в центре Земли, то как бы не перемещалась точка О, маятник всегда будет ориентирован по радиусу Земли, т.е. по вертикали в точке О). Но реализо- вать практически такой математический маятник, очевидно, невозможно. Если вместо математического взять физический маятник, то для него результат сохранится при вы- полнении условия равенства его приведенной длины
l пр
J / mr
(40)
радиусу Земли. В (40) J - момент инерции физического маятника, m - его масса, - рас- стояние от центра подвеса до центра масс. Как показывает анализ, осуществление физи- ческого маятника со свойством невозмущаемости также не представляется реальным.
Однако, невозмущаемый маятник можно реализовать с помощью иных технических средств, например, с помощью акселерометра (А), датчика момента (ДМ) и электронно- го звена (рис.20).

J d&&
u&x
k W&h
W&z d ,
(41)
где J - момент инерции подвижных частей устройства вокруг оси г, k - произведение коэффициентов передачи акселерометра и
электронного звена. После преобразования
(41) получим уравнение того же вида, что и
(38), если положить
l J / k .
Это дает основание изображенное уст-
ройство также назвать маятником, и этот ма- ятник будет невозмущаемым при l = R, т.е. при k = J/R. Это условие в принципе осуще- ствимо.
Заметим, что круговая частота собственных колебаний невозмущаемого маятника,
как следует из (38), равна
W&z
 /
l
.
/
l
.
Для объектов, движущихся на приблизительно постоянной высоте (глубине), верти-
кальное кажущееся ускорение равно g и потому рассматриваемая круговая частота
 wш
g
/
R
wш
g
/
R
1,24 10
31/ c.
Ей соответствует период колебаний
Tш 2p / wш
84,4 мин
Приведенные величины называют шулеровской частотой и периодом Шулера со- ответственно, а невозмущаемый маятник, независимо от его технической реализации - шулеровским маятником или построителем вертикали с шулеровской настройкой.
В заключение следует отметить, что изображенное на рис.20 устройство, реализующее
маятник Шулера, принципиально осуществимо, но не может обеспечить достаточную точ- ность (в частности, из-за наличия неучитывавшегося трения в подвесе). Поэтому такое устройство в качестве датчика вертикали не применяется.