

4.4. Курсовертикали
Как отмечалось при описании указателей курса, для обеспечения точности работы необходима их стабилизация в плоскости местного горизонта. Задачу построения послед- ней решают гировертикали, поэтому вполне естественно совмещение в одном приборе гировертикали и указателя курса. Такие устройства получили название курсовертикали (КВ) или двухгироскопной централи.
Типовая схема курсовертикали изображена на рис.27. Там же показана ее ориентация
на объекте. Устройство предназначено для измерения углов ориентации объекта , , . Рассматриваемая КВ представляет собой платформу 1 в двухстепенном кардановом подвесе. На осях подвеса установлены датчики углов и - ДУ , ДУ и двигатели ДВx, ДВz. Последние есть не что иное, как датчики момента, но достаточно большой мощно- сти. Вне подвижной части КВ размещены электронные звенья 7, 12. Платформа 1 ори- ентируется в плоскость местного горизонта. На ней установлен ГПК, выдающий в сис- тему управления с помощью ДУ информацию для получения ортодромического курса.
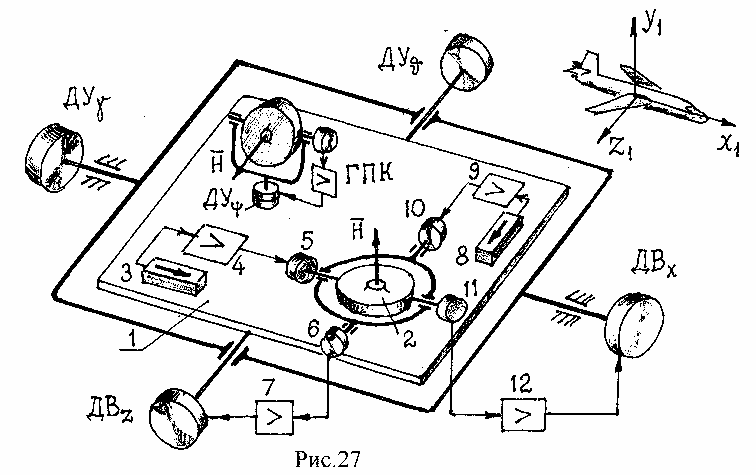
Кроме того, на платформе 1 установлены элементы, обеспечивающие ее совмещение с плоскостью местного горизонта: гироскоп 2 в трехстепенном подвесе с размещенными на
его осях датчиками углов 6, 11 и датчиками момента 5, 10; акселерометры 3, 8 (стрел-
ками на них обозначены направления осей чувствительности); электронные звенья 4, 9.
Элементы 2-7 и ДВz образуют один канал горизонтирования платформы, а элемен-
ты 2, 8-12 и ДВx - другой. Работа этих каналов происходит следующим образом.
При отклонении платформы 1 от плоскости местного горизонта, например, вокруг
промежуточной оси подвеса платформы (оси ) акселерометр 3 выдает сигнал, пропор- циональный этому отклонению (если отсутствует ускорение объекта). Через усилительно- преобразовательное звено 4 сигнал поступает на датчик момента 5. Под действием мо- мента, развиваемого датчиком, гироскоп 2 прецессирует вокруг оси, параллельной оси . Вследствие этого появляется рассогласование по углу между гироскопом 2 и платформой
1, фиксируемое датчиком 6. Сигнал датчика через электронное звено 7 подается на Двz,
который разворачивает всю платформу вместе с акселерометром 3, устраняя исходную не-
горизонтальность платформы.
Нетрудно видеть, что элементы 6, 7, Двz играют роль системы слежения, обеспечивая отслеживание платформой 1 положения гироскопа 2. Если эта система идеальна, то рас- смотренный контур превращается в контур коррекции гирогоризонта (см.раздел 3.4).
Как и в гирогоризонте с шулеровской коррекцией, для обеспечения невозмущаемости КВ в ней реализуется шулеровская настройка: звенья 4 и 9 - интегрирующие с соответст- вующими коэффициентами усиления.
5. Гиростабилизаторы
5.1. Одно- и двухосные гиростабилизаторы
Одноосный гиростабилизатор (ОГС) предназначен для удержания объекта

(нагрузки) от разворотов вокруг одно- го из направлений. Схема ОГС изо- бражена на рис.28. Она включает аста- тический гироскоп в трехстепенном подвесе, на промежуточной оси кото- рого установлен датчик угла ДУ , а на внешней - двигатель Дв, и электрон- ное звено. ДУ установлен так, что значению =0 соответствует направ-
 ление
вектора
H
,
перпендикулярное
плоскости
рамки,
т.е.
внешней
оси
подвеса.
ДУ
,
электронное
звено
и
Дв
образуют
так
называемый
контур
раз-
ление
вектора
H
,
перпендикулярное
плоскости
рамки,
т.е.
внешней
оси
подвеса.
ДУ
,
электронное
звено
и
Дв
образуют
так
называемый
контур
раз-
ОГС стабилизирует в инерциальном пространстве нагрузку Н относительно оси , на-
зываемой осью стабилизации.
Рассмотрим работу ОГС сначала при отсутствии контура разгрузки.
При приложении момента Мн гироскоп в соответствии со вторым основным свойст- вом начнет прецессировать и, в соответствии с третьим свойством, возникнет гироско- пический момент, который будет уравновешивать Мн (с точностью до инерционного мо-
 мента,
т.е.
нутационных
колебаний).
Это
будет
продолжаться
до
тех
пор,
пока
вектор
H
при
прецессии
не
совместится
с
осью
,
после
чего
нагрузку
уже
ничто
не
будет
удер-
живать.
мента,
т.е.
нутационных
колебаний).
Это
будет
продолжаться
до
тех
пор,
пока
вектор
H
при
прецессии
не
совместится
с
осью
,
после
чего
нагрузку
уже
ничто
не
будет
удер-
живать.
Для того, чтобы исключить разворот гироскопа на большой угол , на ось стабилиза-
ции устанавливается Дв, сигнал на который подается через электронное звено от ДУ . При приложении момента нагрузки появляется , а с ним - момент двигателя, уравновеши- вающий момент Мн. Вследствие этого нагрузка сохраняет свое положение во вращении вокруг .
Этот факт можно проследить и по уравнению моментов в проекции на промежуточную
ось, которое имеет вид (считаем 0)
H (a&
ux ) M 0,
(49)
где - угол поворота рамки относительно основания ОГС, u - скорость разворота осно- вания в инерциальном пространстве вокруг , М - момент, действующий по промежуточ- ной оси. При М = 0 имеем
a& ux 0,
(50)
что означает равенство нулю абсолютной угловой скорости рамки, т.е. нагрузки, в проек-
ции на .
Из (49) вытекает также, что основная ошибка стабилизации вызывается вредным мо-
ментом по промежуточной оси, вследствие которого гироскоп, а с ним и нагрузка, "ухо-
дят" со скоростью a&
H 1M .
Дополнительные ошибки возникают из-за ошибок контура разгрузки, вследствие которых 0.
В завершение рассмотрения ОГС отметим, что это устройство может использоваться
и как измеритель: как следует из (50), измерение с помощью ДУ угла поворота рамки относительно основания дает интеграл от проекции угловой скорости объекта на на- правление
t
a ao ux dt .
to
Информации трех ОГС с некомпланарными осями стабилизации достаточно для оп- ределения пространственной ориентации объекта (на таком принципе строятся бескардан- ные инерциальные системы навигации).
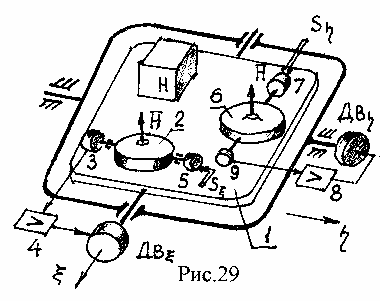
Для того, чтобы имелась возможность управ-
лять ориентацией платформы 1, в схеме преду-
смотрены датчики моментов 5 и 9. При подаче из
системы управления сигналов S и S на эти датчики платформа разворачивается вокруг осей и , ориентируя требуемым образом нагрузку Н.
Двухосные гиростабилизаторы широко используются в системах, где надо стабилизи-
ровать какое-либо устройство: оптическое, тепловое, радиолокационное и т.п.