

6.2. Вибрационный роторный гироскоп
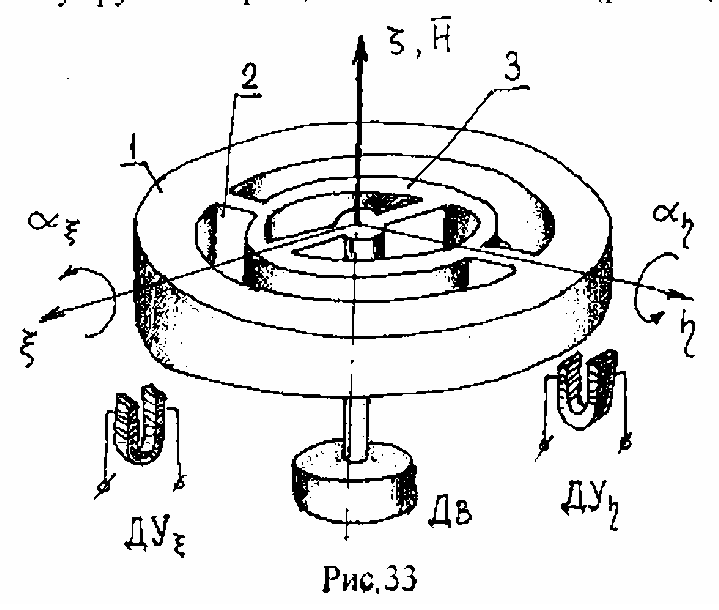
крепится к валу двигателя Дв.
Стяжки имеют конечный коэффи- циент упругости на кручение и весьма большой - на изгиб.
Для съема информации в при- боре имеются два датчика пере- мещений ДУ и ДУ индукционно- го типа, расположенные в двух вза- имно-перпендикулярных плоско- стях, проходящих через ось вра- щения . Очевидно, можно счи- тать, что датчики измеряют углы
и поворота ротора вокруг осей (ДУ ) и (ДУ ), перпендикулярных оси и лежащих в упомянутых выше плоскостях.
Прибор выдает информацию о составляющих абсолютной угловой скорости объекта
по осям и .
Принцип работы ВРГ не отличается от принципа работы уже рассмотренных прибо- ров. При наличии скорости объекта, например, вокруг оси , гироскоп прецессирует во- круг оси до тех пор, пока гироскопический момент вследствие вынужденной прецес- сии не уравновесится упругим моментом стяжек. При этом угол поворота гироскопа, фик- сируемый датчиком ДУ , в линейном приближении пропорционален скорости объекта u .
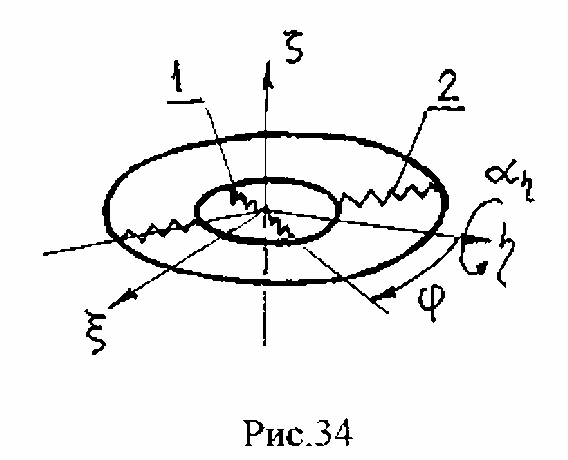
Более строго этот результат можно получить, анализируя уравнения движения ВРГ. Запишем эти уравнения, ограничиваясь рамками прецессионной теории и пренебрегая массами стяжек и кольца. Предварительно установим следующий факт: момент упруго- сти стяжек с одинаковым коэффициентом упругости С каждая при отклонении гиро- скопа вокруг на угол имеет нулевую составляющую по оси и составляющую
M h 2cah
по оси , которые не зависят от положения ротора, т.е. угла (рис.34). Действительно, при развороте ротора на углы скручива- ния стяжек 1 составляют
a1 = ah cosj, (53)
а создаваемый ими момент упругости в про-
екциях на оси и
M1x
M1h
2ca1 sin j 2c
2ca1 cosj 2c
a 2 ah sinj , (54)
а создаваемый ими момент упругости
M 2x
2ca 2 cosj
2cah sin j cos j ,
M 2h
2ca 2
sin j
2cah
sin 2 j .
Суммарный момент упругости
M x M 1x
M 2x
0, M h
M 1h
M 2h
2cah ,
что и требовалось. Отсюда вытекает, что независимо от угла собственного вращения ротора момент упругости равен произведению 2С на величину отклонения ротора и на- правлен так, что
препятствует этому отклонению. Очевидно, то же имеет место и по отношению к момен-
ту сил вязкого трения.
Запишем теперь уравнение моментов с учетом принятых ранее допущений и малости углов и . В проекции на ось и соответственно
H (a&x
H (a&h
ux )
uh )
2cah
2ca x
ha&h 0,
ha& x 0,
где u , u - составляющие абсолютной угловой скорости объекта, h - коэффициент вязко- го трения. Из этих уравнений нетрудно получить уравнения для и . Для (учи- тывая, что h - малая величина)
x
где Т = Н/2С, = h/Н. Для
2lTa&x a x
T (uh
Tu&x ),
(55)
T 2a&&
h
2lTa& a
h h
T (u
x
Tu& ).
h
(56)
(Заметим, что соотношения (55) и (56) менее трудоемко получаются с использованием операционного исчисления).
Из полученных соотношений следует, что ВРГ является колебательным звеном и по- сле затухания переходного процесса и при отсутствии угловых ускорений объекта его вы- ходные сигналы пропорциональны составляющим u и u абсолютной угловой скорости объекта. Влияние на выходные сигналы углового ускорения можно рассматривать как ошибку, но более эффективно учитывать его аналитически при совместной отработке обоих сигналов и .
Заметим, что если угловая скорость объекта, а следовательно и величины ,
постоянны, то углы скручивания стяжек, как это следует, в частности, из (53) и (54), из-
меняются с высокой частотой, равной скорости вращения ротора j& . С этой частотой ко-
леблется (вибрирует) кольцо. Наличие вибрационной частоты и обусловило название ги-
роскопа.
ВРГ, как видно, прост по конструкции. Он имеет малые вес и габариты, но характери-
зуется недостаточно высокой точностью.