

10. Гироскопические приборы и устройства космических летательных аппаратов
10.1. Особенности задач управления космическими летательными аппаратами
Управление движением космических летательных аппаратов (КЛА) требует решения уже перечислявшихся в разделе 2.1 задач: построение системы координат, определение в ней ориентации КЛА, измерение составляющих угловой скорости, измерение прираще- ний линейной скорости при включении двигателей КЛА (для смены или корректировки орбиты, выполнения маневров и т.п.). Специфической для КЛА является указанная в разделе 2.1 задача создания с помощью гироскопа управляющих моментов на объект.
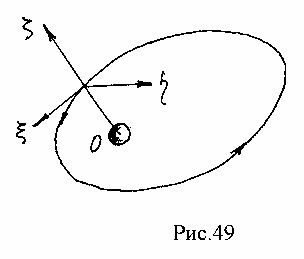
Что касается определения составляющих угловой и линейной скоростей КЛА, то они измеряются с помощью рассмотренных выше гироприборов: гиротахометра, гироинте- гратора линейных ускорений, акселерометра и др. Что же касается построения системы координат и определения относительно нее ориентации объекта, то применительно к КЛА есть некоторые особенности решения этих задач . И связаны эти особенности с ра- ботой КЛА в невесомости, вследствие чего не представляется возможным использовать те методы построения вертикали, которые описывались выше (понимая под вертикалью применительно к КЛА направление вектора "центр Земли - КЛА"). Построение же этого направления необходимо, поскольку, как правило, требуется знать ориентацию КЛА относительно направления на Землю и плоскости орбиты, т.е. в так называемой орбиталь- ной системе координат. Упомянутая система координат строится следующим образом (рис.49): плоскость - плоскость орбиты, причем ось направлена по радиусу- вектору КЛА с началом в центре Земли, ось - в сторону движения, ось перпенди- кулярна плоскости орбиты.
тальной системы координат может быть применен (и применяется) трехосный гиростабилизатор, но для ориентации ГСП в плоскость используется информация не акселерометров (их сигнал в невесо- мости - нулевой независимо от ориентации), а иные измерители - инфракрасная вертикаль и радиоверти- каль - высотомер.
Для определения же азимутальной ориентации
КЛА, т.е. угла его разворота вокруг оси применяют специальный гироприбор - гироорбитант.
Упоминавшаяся выше задача создания управ- ляющих моментов на КЛА решается с помощью силовых гироскопических приборов (СГК), получивших также название гиродины. Применительно к малогабаритным КЛА в этих же целях используют также негироскопические устройства - реактивные маховики.
10.2. Гироорбитант
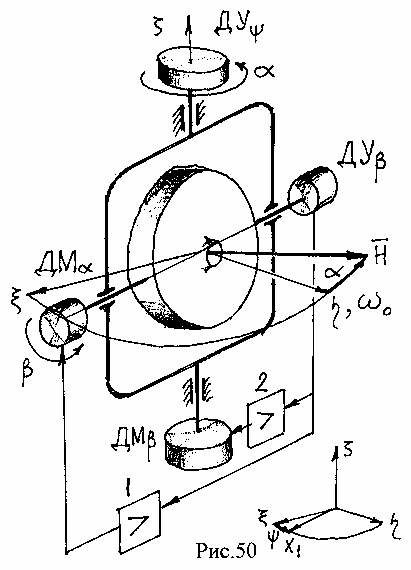
Гироорбитант (ГО), как отмечалось, предназначен для измерения курсового угла - угла между продольной осью КЛА и плоскостью орбиты. Схема прибора изображена на рис.50. Она включает трехстепенной астатический гироскоп, выходной датчик угла ДУ ,
датчик угла по промежуточной оси подвеса ДУ , два датчика момента ДМ и ДМ по промежуточной и внешней осям подвеса соответственно, два электронных звена 1 и 2. Прибор работает при совмещении его внешней оси с вертикалью . Это обеспечивается соответствующей ориентацией объекта или стабилизируемой платы (в частности, ГСП)
- в зависимости от места размещения ГО. В любом случае для этого используется ин-
формация инфракрасной вертикали или радио-вертикали-высотомера.
Если исключить из схемы ДМ , то нетрудно видеть, что в таком виде схема ГО сов- падает со схемой маятникового гирокомпаса. При этом роль маятника играет контур "ДУ - электронное звено 1-ДМ ".
вместе с ГО вращается вокруг оси с уг- ловой скоростью o - орбитальной угловой скоростью, то в направлении этой скорости и будет ориентироваться вектор H . Плос-
кость же внешней рамки ГО будет совпа-
дать с плоскостью орбиты, и с ДУ в систе- му управления будет поступать курсовой угол (с обратным знаком, если он отсчитыва- ется в том же направлении, что и угол ).
Контур "ДУ -электронное звено 2-ДМ " на первый взгляд представляется контуром межрамочной коррекции. В действительно- сти же его роль состоит в демпфировании колебаний маятникового гирокомпаса. Для того, чтобы убедиться в этом, запишем урав- нения моментов для ГО в проекции на про- межуточную ось подвеса и на ось . При этом ограничимся рамками прецессионной теории и будем полагать углы и ма- лыми.
H (a&
H ( b&
uz )
ub )
Hwo b
1
K1 b
K 2 b
M врb 0,
M врa 0.
Здесь uz , ub - проекции угловой ско- рости основания ГО на ось и промежуточную ось подвеса соответственно; К1, К2 - ко- эффициенты усиления электронных звеньев 1 и 2 соответственно; Mвр , Mвр - вредные моменты, действующие по внешней и промежуточной осям подвеса соответственно. Из этой системы вытекает следующее уравнение для
1
H K 2a&
1
H 1w K a
o
1
(u&z
1
H K 2 uz )
1
(67)
H K1 u b
H K1 M врa
H ( M& врb
H K 2 M врb )
(при выводе этого уравнения учитывалось, что К1 выбирается так, что К1/Н>>w0). При отсутствии движения основания ГО и вредных моментов уравнение (67) имеет очевидное решение = 0, которое и соответствует ориентации вектора H в направлении орбиталь-
ной угловой скорости. Из вида левой части (67) с очевидностью вытекает отмеченная вы-
ше роль контуров с ДМ и ДМ , а правая часть (67) выявляет источники части основных погрешностей ГО. Кроме них на точность влияет ошибка совмещения внешней оси под-
веса с вертикалью и некоторые другие менее значимые факторы. Суммарная погреш-
ность ГО составляет несколько угловых минут.