

2. Назначение гироскопических устройств и их основные типы
2.1. Задачи, решаемые гироскопическими устройствами
Своим появлением и последующим развитием прикладная гироскопия обязана зада- чам навигации. И до сегодняшнего дня основной областью применения гироскопических приборов являются системы управления различного рода подвижных объектов: судов, са- молетов, спутников, ракет и т.п. Как известно, управление подвижным аппаратом включа- ет две задачи: задачу управления движением около центра масс (задачу ориентации и ста- билизации объекта) и задачу управления движением центра масс (навигационная задача). Основными источниками информации для решения обеих задач и являются гироскопи- ческие приборы и устройства.
В составе систем управления ориентацией и стабилизации объектов гироскопиче-
ские устройства обеспечивают:
- построение системы координат, относительно которой требуется знать ориентацию объекта,
- измерение углов, характеризующих ориентацию объекта,
- измерение составляющих угловой скорости объекта.
В составе систем навигации подвижных аппаратов гироскопические устройства ре-
шают задачи:
- построения системы координат, в которой решается навигационная задача - счисле-
ние скорости и координат объекта;
- измерение составляющих линейной скорости (или ускорения) объекта в упомянутой выше системе координат.
При этом следует отметить, что задачи построения системы координат, о которых говорилось выше, могут решаться гироскопическим устройством либо непосредственно, т.е. путем физической реализации требуемых направлений, либо косвенно, путем выдачи в систему управления информации, по которой ориентация требуемых направлений от- носительно объекта может быть вычислена аналитически (как это делается в так назы- ваемых бескарданных инерциальных системах навигации).
2.2. Основные элементы гироскопических приборов и устройств
Под гироскопическим прибором далее понимается электронно-механическая систе- ма, работа которой использует только гироскопические эффекты. Под гироскопическим же устройством понимается система, которая помимо гироскопа содержит дополнитель- ные источники информации о внешних физических полях, что необходимо для решения системой возложенных на нее задач. Таким образом, гироскопическое устройство - более широкое понятие, чем гироприбор. Впрочем, указанное деление имеет лишь методическое значение.
Основным элементом любого гироприбора является гироскоп в кардановом подвесе. Помимо гироскопа в состав гироприбора, как правило, входят устанавливаемые на оси карданова подвеса датчики углов и датчики моментов. Последние представляют со- бой электромеханические устройства, построенные по схеме обычного двигателя. Они предназначены для создания моментов на гироскоп, пропорциональных подаваемым на датчики сигналам, и тем самым - для управления движением гироскопа. Кроме того, для обеспечения функционирования прибора, преобразования его входной и выход- ной информации, формирования требуемых законов управления в состав прибора входят электронные блоки, состав и назначение которых определяется назначением самого ги- роприбора. Питание гироприбора осуществляется от источника электроэнергии, кото- рый, как правило, в состав гироприбора не входит.
Гироскопические устройства помимо перечисленных элементов включают, как отме-
чалось, дополнительные, не гироскопические измерители (приборы), необходимые для выполнения устройством своих функций. В частности, большое число гироскопических устройств включают в свой состав датчики местного горизонта (вертикали) и акселеро- метры. Это связано с тем, что для управления подвижными объектами в большом числе случаев требуется построить систему координат, связанную с местным горизонтом. По- строить же плоскость местного горизонта гироскоп не способен.
В связи с отмеченным представляется целесообразным кратко остановиться на упо-
мянутых датчиках горизонта (вертикали) и акселерометрах.
Простейшим датчиком вертикали является маятник, на принципе которого построен использовавшийся в первых разработках датчик маятниковой коррекции, изображен- ный на рис.12.
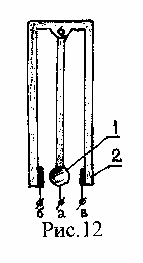
ми б и в свидетельствует о совмещении щечек
2, связанных жестко с прибором, с вертикалью (с точностью до зазора между грузом 1 и щечками 2).
Из широко применявшихся датчиков горизонта следует упомянуть также ртутный переключа- тель и датчик жидкостный маятниковый , схемы которых изображены на рис.13 и 14 соответ- ственно. Принцип работы этих датчиков и рассмот- ренного выше одинаков, лишь роль груза 1 в дат- чике маятниковой коррекции (рис.12) в ртутном переключателе играет шарик 1 (рис.13) из ртути, а в жидкостном датчике - электролит 1 с пузырьком воздуха в нем (рис.14). При этом ртутный переклю-
чатель и датчик жидкостный маятниковый дают
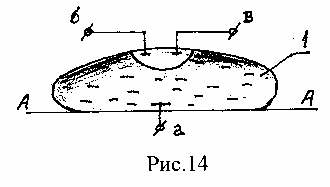
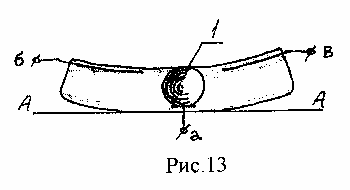
информацию об отклонении от горизонта плоскости АА, на которую они установлены.
Совершенно очевидно, что перечисленные датчики имеют ограниченные возможно- сти по точности. В частности, по принципу построения все они имеют зону нечувстви- тельности в окрестности нулевых отклонений от горизонта. В настоящее время эти датчи- ки практически не используются.
Более совершенным прибором, решающим задачу определения вертикали, является акселерометр (ньютонометр), представляющий собой подвешенную на пружине массу. В зависимости от вида подвеса различают линейный и маятниковый акселерометры; их схемы изображены на рис.15 и 16 соответственно. При размещении акселерометра на Зем- ле, в том случае, когда его базовая поверхность АА (параллельная оси чувствительности l ) отклонена от горизонта, масса m смещается относительно своего положения равно- весия. При этом величина смещения, измеряемая датчиком линейного или углово- го
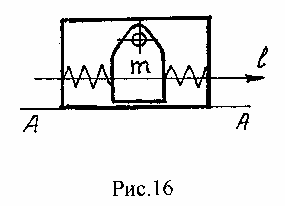
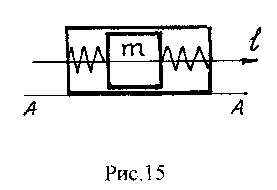
перемещения, пропорциональна отклонению от горизонта и является выходным сигна-
лом акселерометра.
Следует отметить, что механические пружины на рис.15,16 изображены условно. В реальных конструкциях акселерометров, а также гироскопических приборов и устройств широко используется так называемая "электрическая пружина". Она включает в себя датчик линейного или углового перемещения и датчик силы или момента. Формируе- мый датчиком перемещения сигнал поступает на датчик силы (момента), который фор- мирует силу (момент) противодействия, пропорциональную смещению. При исполь- зовании электрической пружины с индукционным датчиком силы (момента) доста- точно просто реализуется демпфирование перемещающейся массы. Для этого в обмотке датчика силы (момента) предусматривается несколько короткозамкнутых витков. Воз- никающие в них токи Фуко, взаимодействуя с перемещающейся массой, создают проти- водействующую силу, пропорциональную скорости перемещения.
Выше предполагалось, что датчики местного горизонта в составе гироскопического
устройства работают на неподвижном или движущемся без ускорения объекте. Однако, гироскопические устройства предназначены для работы и на объектах, движущихся с ускорением. Понятно, что наличие ускорения приводит к ошибке в выходном сигнале датчика. Возникает вопрос: какую информацию выдает датчик, в частности, акселерометр при работе на подвижном основании? Поскольку ответ на этот вопрос нетривиален и важен для последующего анализа работы гироскопических устройств, рассмотрим его отдельно.