

4.2. Маятниковый гирокомпас
Схема маятникового гирокомпаса изображена на рис.25 в двух вариантах: а) с ис-
пользованием груза m, б) с использованием акселерометра А и датчика момента ДМ
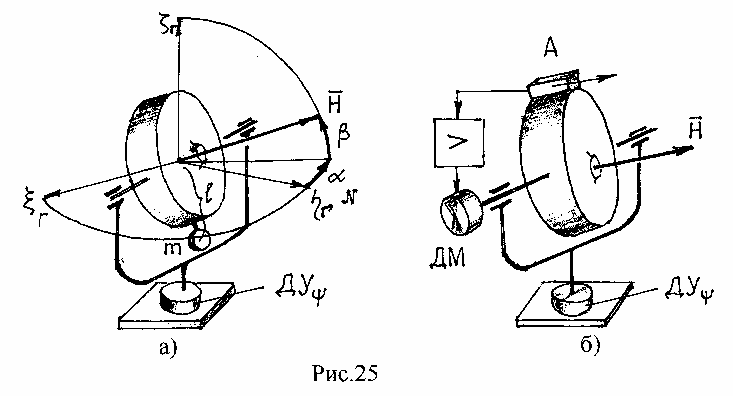
Эквивалентность этих двух схем с точки зрения их функционирования очевидна.
В отличие от гироскопа Фуко 1-го рода в этих схемах гироскоп имеет все три степени свободы, но одна из них ограничена: при отклонении гироскопа относительно промежу- точной оси подвеса возникает момент противодействия этому отклонению. В пределе, когда m в схеме а) или коэффициент усиления контура "ускорение-момент" k в схеме б) эти приборы превращаются в гироскоп Фуко.
Ограничиваясь рамками прецессионной теории, рассмотрим работу прибора, для
конкретности, прибора а), в условиях неподвижного относительно Земли основания. При этом будем полагать, что углы и малы.
Очевидно, что как и в гироскопе Фуко, при 0 и 90 град возникает гироскопи- ческий момент (44). Но в рассматриваемом приборе он вызывает прецессию гироскопа вокруг промежуточной оси со скоростью
b& H
1M гz .
Отсюда вытекает первое уравнение, описывающее движение гироскопа - уравнение моментов в проекции на ось О г
b& ( cosj )a 0.
(46)
Нетрудно получить и уравнение моментов в проекции на промежуточную ось подвеса гироскопа ( l - плечо груза m):
H (a& sin j )
mglb 0.
Вводя w H
1mgl , это уравнение запишем в виде
a& wb
sinj . (47)
Уравнения (46), (47) описывают работу маятникового гирокомпаса в условиях Земли.
Дифференцируя (47), с учетом (46) получим
a&& w
cosj a 0,
откуда вытекает, что гироскоп совершает колебания относительно положения = 0, т.е.
относительно направления на Север. При наличии демпфирования этих колебаний, после
 их
затухания
вектор
H будет
ориентирован
в
направлении
на
Север.
Заметим,
что
при
их
затухания
вектор
H будет
ориентирован
в
направлении
на
Север.
Заметим,
что
при
этом не становится нулевым, а равно константе, определяемой из (47) при a& 0
b w 1 sin j.
Вследствие этого отклонения груз создает момент по промежуточной оси
M mglb
H sinj,
под действием которого гироскоп прецессирует в плоскости горизонта со скоростью
H 1M
sin ,
т.е. с вертикальной составляющей скорости Земли. Тем самым гироскоп отрабатывает изменение направления на Север из-за вращения Земли.
Как и в случае гироскопа Фуко, наличие трения по наружной оси приводит к ошибке,
неограниченно возрастающей с приближением к полюсам Земли.
При использовании маятникового гирокомпаса на подвижном объекте проявляются дополнительные ошибки, или девиации, как принято именовать ошибки для курсовых систем - скоростная и баллистическая.
Причиной скоростной девиации является то, что как и гироскоп Фуко, маятниковый
гирокомпас реагирует на суммарную абсолютную угловую скорость основания, включая угловую скорость, обусловленную перемещением объекта относительно Земли. Причи- ной же баллистической девиации являются дополнительные отклонения груза m или по- явление дополнительной составляющей в сигнале акселерометра, обусловленные кажу- щимся ускорением объекта. Вместе с тем, по сравнению с гироскопом Фуко требование по стабилизации основания маятникового гирокомпаса существенно ослабляется.
Тем не менее, неработоспособность прибора в высоких широтах и упомянутые выше девиации прибора существенно ограничивают область его применимости.
В заключение целесообразно отметить следующее. Как показал анализ, ни гироскоп Фуко, ни маятниковый гирокомпас не способны определять направление меридиана ме- стонахождения в высоких широтах. Но очевидно, что в принципе невозможно построить гироскопический прибор, который строил бы направление на Север в любых широтах. Гироскоп реагирует на угловую скорость Земли и определяет направление на Север по направлению горизонтальной составляющей этой скорости. Но эта составляющая в ок- рестности полюсов становится малой. В самих же полюсах она равна нулю и в этих точках географические направления просто не определены.