

4. Указатели курса и курсовертикали
4.1. Гироскоп Фуко 1-го рода
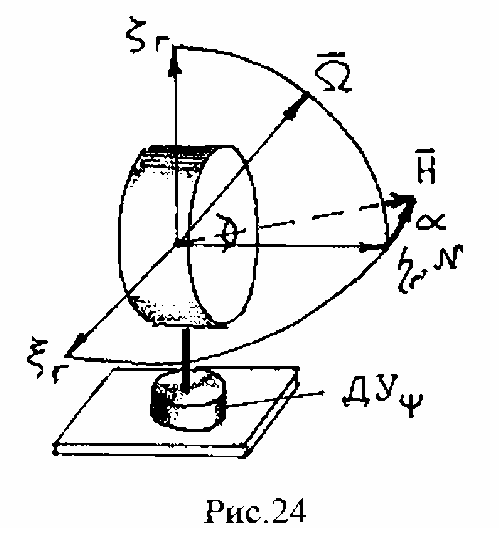
Рассмотрим работу прибора. В соответ-
ствии с третьим основным свойством гиро- скопа, поскольку основание гироскопа вра- щается, возникает гироскопический момент, составляющая которого по оси O г равна
M z H
cosj sin a, (44)
 где -
угловая
скорость
Земли, -
ши-
рота
места, -
угол
отклонения
H
от
на-
правления
N
на
Север.
При
отсутствии
тре-
где -
угловая
скорость
Земли, -
ши-
рота
места, -
угол
отклонения
H
от
на-
правления
N
на
Север.
При
отсутствии
тре-
ния в опоре уравнение движения гироскопа
вокруг оси O г имеет вид
Ja&& (H
cos j ) sin a 0 (45)
(J - момент инерции гироскопа с кожухом), т.е. совпадает с уравнением движения маят- ника. Следовательно гироскоп совершает незатухающие колебания относительно на- правления на Север. При наличии вязкого трения эти колебания затухают и гироскоп устанавливается в положение равновесия = 0, т.е. в направлении на Север. Заметим, что направление на Юг также является положением равновесия ( = 180 град удовлетво- ряет уравнению (45)), но неустойчивого. Момент (44), ориентирующий гироскоп на Се- вер, называется направляющим.
При наличии момента трения Мтр в подвесе гироскоп будет иметь ошибку, опреде-
ляемую из равенства величин Мтр и Мг . При малом Мтр ошибка равна
a M тр / H
cosj .
Отсюда видно, что при , стремящемся к 90 град, ошибка беспредельно возрастает,
т.е. гироскоп Фуко в высоких широтах неработоспособен.

 Если
основание
гироскопа
Фуко
связано
с
подвижным
объектом,
то,
как
нетрудно
ус-
тановить,
гироскоп
(при
отсутствии
трения
в
опоре)
займет
положение,
при
котором
вектор
H
,
ось
подвеса
гироскопа
и
абсолютная
угловая
скорость
объекта
компланарны.
И
если
угловая
скорость
объекта
соизмерима
со
скоростью
вращения
Земли,
то
H бу-
дет
существенно
отклонено
от
направления
на
Север.
Из
изложенного
следует,
что
ис-
Если
основание
гироскопа
Фуко
связано
с
подвижным
объектом,
то,
как
нетрудно
ус-
тановить,
гироскоп
(при
отсутствии
трения
в
опоре)
займет
положение,
при
котором
вектор
H
,
ось
подвеса
гироскопа
и
абсолютная
угловая
скорость
объекта
компланарны.
И
если
угловая
скорость
объекта
соизмерима
со
скоростью
вращения
Земли,
то
H бу-
дет
существенно
отклонено
от
направления
на
Север.
Из
изложенного
следует,
что
ис-
пользование гироскопа Фуко на подвижном объекте возможно лишь при условии уста-
новки его на стабилизируемое относительно горизонта основание и при ограниченных скоростях движения V (с тем, чтобы отношение V/R было малым по сравнению с ).
По указанным причинам гироскоп Фуко в системах управления подвижных объектов практически не используется.