

6.3. Гиротрон
Вибрационный стержневой гироскоп, или гиротрон, представляет собой прибор, изображенный на рис.35. Он включает вибратор 1 типа камертона на торсионе 2, дат- чик угла 3 индукционного типа и элементы возбуждения и поддержания колебаний
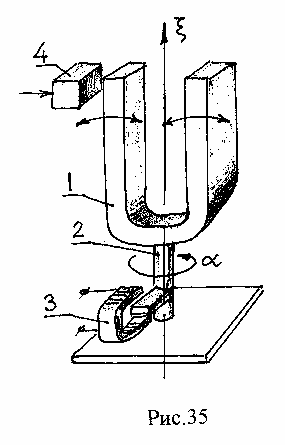
Принципиальное отличие гиротрона от
ранее рассмотренных гироприборов со- стоит в том, что вращающегося ротора в нем нет, его заменяют вибрирующие стержни.
Рассмотрим принцип работы гиротро-
на.
Для этого выделим элемент m
 вибрирующего стержня
(рис.36)
и
рас-
смотрим его
движение. Вследствие
вибрации
он
имеет
линейную
скорость
V
в
плоскости
вибрации;
величину
этой
скорости
можно
считать
изменяющейся
по гармоническому закону
вибрирующего стержня
(рис.36)
и
рас-
смотрим его
движение. Вследствие
вибрации
он
имеет
линейную
скорость
V
в
плоскости
вибрации;
величину
этой
скорости
можно
считать
изменяющейся
по гармоническому закону
V Aw sin wt,
где А - амплитуда колебаний, зависящая от места расположения элемента m в стержне,

o

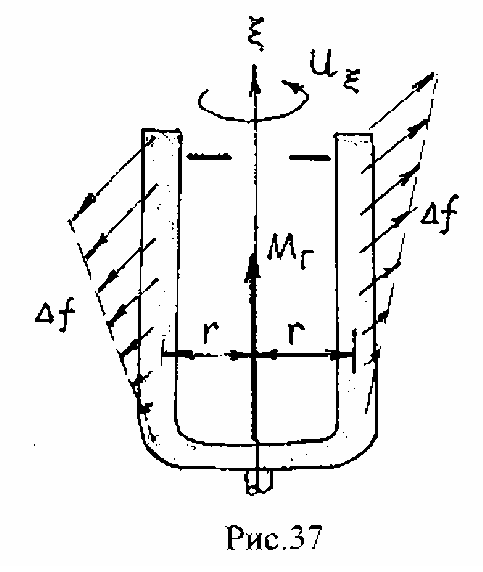
Но наличие у элемента этого ускоре- ния означает, что с его стороны на стер- жень действует сила , равная по вели- чине
f ak m
2ux Aw sin wt.
M г 2r
Эти элементарные силы, направление которых на протяжении полупериода ко- лебаний одинаково для всех элементов одного стержня (рис.37), создают момен- ты
f ,
где 2r - расстояние между стержнями. Суммирование элементарных моментов дает результирующий момент
М г k1ux sinwt,
где k1 - умноженный на 4r интеграл по всей массе вибратора от величины А , т.е. кон-
станта.
Нетрудно видеть, что момент Мг имеет ту же природу, что и гироскопический момент, что оправдывает отнесение гиротрона к гиро- скопическим приборам.
Составим теперь уравнение движения виб- ратора вокруг оси , обозначив - угол скручивания торсиона, J - момент инерции вибратора относительно оси , h - коэффици- ент вязкого трения, С - коэффициент упруго- сти торсиона:
![]()

![]()
![]() (57)
(57)
шения переходного процесса, описываемого решением уравнения (57) при нулевой пра- вой части и заданных начальных условиях, поведение будет описываться частным ре- шением уравнения (57). Как известно, для линейного дифференциального уравнения с гармонической правой частью частное решение также является гармонической функцией той же частоты (за исключением случая совпадения частоты возмущающей силы с кор- нем характеристического полинома дифференциального уравнения).
При этом амплитуда гармоники
где
Aa Кux ,
(58)
К k1C 1 1
T 2w 2 2
 2lTw
2
2lTw
2
1 / 2
,
(59)
 T J
/
C
, l
T J
/
C
, l
h / 2
JC .
Таким образом, выходной сигнал гиротрона представляет собой гармонический сигнал с частотой, равной собственной частоте вибратора, и с амплитудой, пропорциональной (с известным коэффициентом пропорциональности) измеряемой угловой скорости u . Для того, чтобы повысить добротность прибора, целесообразно его параметры подобрать так, чтобы максимизировать К. Как следует из (59), с учетом малости максимум дости- гается при Т =1, т.е. при совпадении частоты собственных колебаний вибратора с соб- ственной частотой его колебаний вокруг оси . При этом
К=k1/2lC.
Это обстоятельство используется на практике.
Гиротрон - достаточно простой и удобный в эксплуатации прибор. Однако, он пред- ставляет определенные сложности в производстве (в частности, требует высокой точно- сти изготовления деталей, тщательной балансировки), требует применения высокочувст- вительного датчика угла и (для обеспечения приемлемой точности) поддержания ста- бильной рабочей температуры.