

11.3. Электростатическая опора (подвес)
В этой опоре поддержание обеспечивается электростатическими силами. При этом в существующих конструкциях электростатическая опора является трехкомпонентной, и она выполняет роль подвеса гироскопа. По этой причине говорят об электростатическом подвесе, а не об опоре. Схема гироскопа с электростатическим подвесом изображена на рис.53.
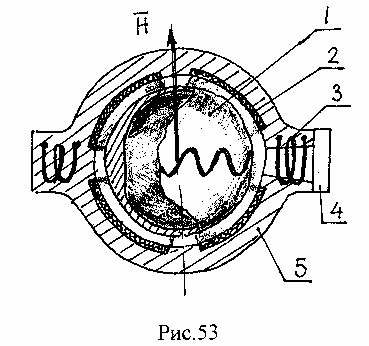
тор 1, три пары обкладок 2 конденсаторов,
система разгона 3, устройства съема сигналов
4 И корпус 5.
Ротор представляет собой тонкостенный
(с толщиной стенок от 0,5 мм у полюсов до
2,5 мм на экваторе) шарик диаметром 30-50 мм. Утолщение стенок у экватора позволяет увеличить осевой момент инерции ротора и, следовательно, кинетический момент. По- лым же шарик делается с тем, чтобы обеспе- чить его малый вес, соответствующий под- держивающим способностям подвеса с уче- том эксплуатационных перегрузок. С этой же целью изготавливается он из легкого ме-
талла - алюминия или бериллия. Вес ротора составляет 25-30 г.
Поддерживается ротор электростатическими силами, возникающими между ним и обкладками 2 трех конденсаторов при сообщении обкладкам электрических потен- циалов. Поскольку поддерживающая сила растет с увеличением разности потенциалов, последнюю стремятся сделать по возможности большой. В воздухе напряженность элек- тростатического поля ограничена величиной около 3 кВ/мм, при превышении ее проис- ходит пробой. В связи с этим полость электростатического гироскопа вакуумируют, что позволяет увеличить напряженность поля до нескольких десятков кВ/мм.
Сила поддержания увеличивается также при уменьшении зазоров между ротором и обкладками. В связи с этим указанный зазор уменьшают до 0,15-0,25 мм. Это требует, естественно, высокой точности изготовления деталей, а также чистоты обработки. Требование чистоты связано с необходимостью исключения "стекания" заряда на вы- ступы неровной поверхности.
Следует отметить, что при отсутствии регулирования потенциалов обкладок ро-
тор не будет находиться в центре полости, т.е. это положение неустойчиво. В связи с
этим подвес содержит систему регулирования - так называемую резонансную цепь - благодаря которой величины потенциалов, сообщаемых обкладкам, регулируются в за- висимости от положения ротора (этим положением определяется емкость системы "об- кладки - ротор" и ток в резонансной цепи).
Разгон ротора осуществляется вращающимся магнитным полем, создаваемым катуш- ками 3. Наконец, съем информации осуществляется с помощью двух оптиче- ских систем 4, расположенных в экваториальной плоскости гироскопа под углом 90 друг к другу. Система направляет на ротор луч света ,а отраженный луч, промодулиро- ванный нанесенным на ротор рисунком, принимает и анализирует, определяя на-
правление и величину отклонения вектора H в плоскости, проходящей через оптиче-
скую ось системы и вектор H .
В настоящее время технология изготовления электростатического подвеса хорошо отработана и он широко используется в системах навигации, прежде всего, в объектах, движущихся с малыми перегрузками, в частности в судовых системах. Следует отме- тить, что гироскопические устройства с рассмотренным подвесом (а это, в основном, гирогоризонты) являются в настоящее время наиболее точными из применяемых в сис- темах навигации.