

10.3. Гиродин
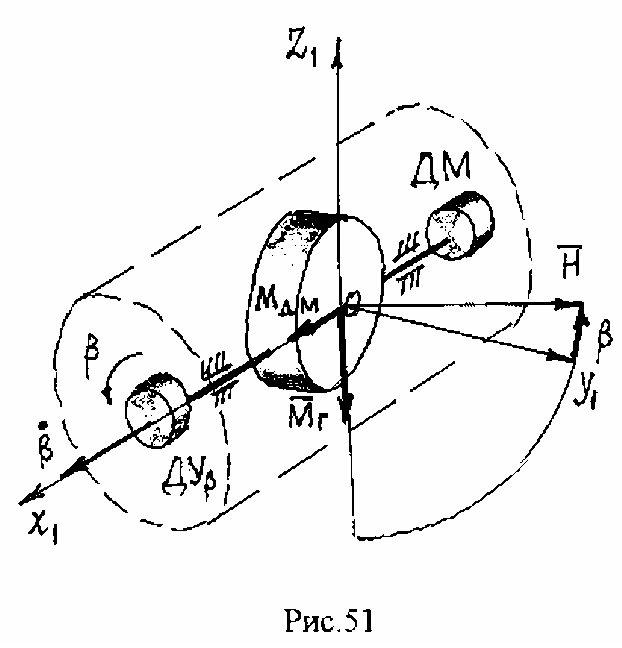
Гиродин - гироприбор, предназначенный для создания управляющих моментов и пари- рования вредных моментов, действующих на КЛА. Он представляет собой (рис.51) двух- степенной астатический гироскоп, на оси подвеса которого установлены датчик момента ДМ и датчик угла ДУ.
При действии на КЛА момента, перпендикулярного оси подвеса и составляющего с вектором H угол 0, гироскоп прецессирует, стремясь совместить вектор H с векто-
При этом возникает гироскопический момент, уравновешивающий внешний, вследствие чего КЛА сохраняет свою ориентацию. Продолжается это до тех
пор, пока H не совместится с М. (Точно так же, как описывалось выше, работает ОГС при отключенном контуре разгруз- ки).
Понятно, что, например, гиродин, изо- браженный на рис.51 и предназначенный для создания момента вокруг оси z1, бу- дет эффективно парировать вредный мо- мент по этой оси до тех пор, пока <50-
60 град. Для контроля этого угла в схеме
предусмотрен датчик ДУ , и при дости- жении углом значения, близкого к 90 град, системой управления КЛА произ-
водится операция, именуемая разгрузкой. Она заключается в том, что с помощью актив-
ных двигателей создается момент по оси z1, действующий на КЛА и гиродин, благодаря которому накопленный угол отрабатывается. Нетрудно понять, что схема разгрузки та же, что и в ОГС, но разгрузка производится не постоянно, а эпизодически, по мере накопления угла . Так гиродин парирует вредные моменты, действующие на КЛА.
При работе же в режиме управления движением гиродин создает момент, действую-
щий на КЛА. Для этого на ДМ подается сигнал; под действием развиваемого ДМ момента МДМ гироскоп прецессирует вокруг оси z1. При этом, если момент инерции КЛА во- круг оси z1 мал, то в эту прецессию вовлекается и КЛА. Если же момент инерции не мал, то реакцией КЛА при воздействии на него гироскопа при прецессии пренебрегать нельзя. А эта реакция - момент по оси z1 - приводит к развороту гироскопа по углу , вслед- ствие которого возникает прилагаемый к КЛА гироскопический момент Мг.
Сказанное подтверждается следующими теоретическими выкладками. Составим уравнение движения КЛА (считая его твердым телом) вокруг оси z1 связанной с ним системы координат x1y1z1. При этом для упрощения будем полагать, что моменты инер- ции КЛА вокруг осей x1 и y1 примерно одинаковы. Это дает возможность в динамическом уравнении Эйлера (5) для оси x, записанном применительно к КЛА, опустить нелиней- ный член, содержащий произведение угловых скоростей. (Впрочем, для этого же можно условиться считать угловую скорость КЛА малой). Обозначив Jz и uz1 соответст-
венно момент инерции и угловую скорость КЛА вокруг оси z1, при малом и отсут-
ствии движения вокруг оси x1 (ux1 0) требуемое уравнение запишем в виде
J z u& z1
Hb& 0.
Здесь второе слагаемое есть, очевидно, гироскопический момент, развиваемый гироди-
ном, который и управляет ориентацией КЛА вокруг оси z1.
Составим теперь уравнение движения гироскопа вокруг оси x1, полагая uy1 0
J г b&&
Hu z1
M ДМ 0,
где Jг - момент инерции гиродина вокруг оси x1 . Из записанных двух уравнений не-
трудно получить уравнение для определения движения КЛА вокруг оси z1
2
2
n u z1
H 1n
M ДМ ,
(68)
где n
 Н
/
J
z
J
г
Н
/
J
z
J
г
- нутационная частота гироскопа в подвесе, внешней рамкой которо-
го является КЛА.
Из (68) следует, что если пренебречь моментом инерции гиродина (как это делается в рамках прецессионной теории) или моментом инерции КЛА, то
Uz1 = -H-1MДМ,
т.е. КЛА вместе с гироскопом прецессирует со скоростью, получаемой по прецессионной
теории. С учетом же моментов инерции эта скорость достигается не сразу с приложени- ем момента Мдм, а через некоторый интервал времени, тем больший, чем больше инер- ционность КЛА и гиродина.
В заключение следует отметить, что использование гиродинов в КЛА дает возмож- ность значительно снизить потребные запасы рабочего тела для активных управляющих органов (жидкостных или воздушно-реактивных двигателей и т.п.). В настоящее время разработано несколько модификаций гиродинов с кинетическим моментом от десятков до нескольких тысяч Нмс.