

8.2. Негироскопические измерители линейных ускорений
Кроме ГИЛУ в системах управления подвижных объектов используются и другие,
негироскопические измерители ускорения.
К их числу относятся уже рассматривавшиеся ранее, в разделе 2, линейный и маятни- ковый акселерометры. Эти приборы могут обеспечивать точность измерения на уровне, которым характеризуются ГИЛУ. Кроме того, существуют акселерометры, имеющие ма- лые массу и габариты, вплоть до миниатюрных, но, естественно, обладающие существен- но более низкой точностью. Широкий диапазон характеристик точности, массы и габари-
тов, который может быть обеспечен акселерометрами, обусловили обширную номенкла-
туру этих приборов и их достаточно широкое применение.
вестно, от силы натяжения и длины, изменятся, причем у верхней струны частота уве-
личится, у нижней - уменьшится. По разности измеренных частот колебаний струн и оп-
ределяется кажущееся ускорение .
Количественно описанный эффект может быть оценен с использованием выводимой в математической физике зависимости
 f (2l)
f (2l)
1 N / r
между частотой первой, наиболее интенсивной, гармоники собственных колебаний струны, ее длиной l , линейной плотностью r и силой натяжения N.
Наконец, разработаны акселерометры, использующие пьезоэффект - известное из фи-
зики явление образования разности потенциалов на противоположных гранях пьезокри- сталла при его механической деформации в направлении, перпендикулярном этим гра- ням. Но эти приборы-пьезоакселерометры- широкого применения в системах управления подвижных объектов также не получили.
9. Оптические гироскопы
9.1. Принцип работы оптических гироскопов
Прежде всего, целесообразно отметить, что описываемые ниже приборы называют ги- роскопами в значительной степени условно: только потому, что решаемая ими задача - измерение абсолютной угловой скорости объекта - традиционно решалась и решается с помощью гироскопических устройств.
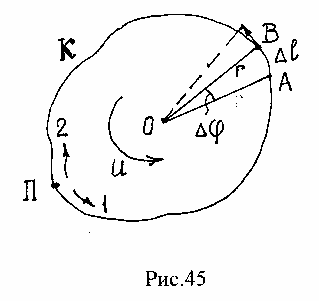
Принцип работы оптических гироскопов основывается на обнаруженном в начале ве- ка французским ученым Саньяком эффекте интерференции волн оптического диапазона, движущихся по и против направления движения замкнутого контура. Для пояснения существа работы рассмотрим движение двух когерентных волн 1 и 2 (рис.45) по замкну- тому контуру К, вращающемуся вместе с источником и приемником волн П вокруг оси, перпендикулярной плоскости контура, с угловой скоростью u. Выделим малый участок
АВ контура длиною l и определим время t1 ( t2) прохождения его волной 1 (2) с
учетом вращения контура. Для определения t1 имеем уравнение
C t1
l ur
t1 ,
где слева - полный путь, пройденный волной за время t1, C - скорость волны, справа -
длина участка и дополнительный путь, обусловленный вращением контура.
t1 lC
1 (1
C 1ur).
Для t2 , очевидно, получим
t2 lC
1 (1
C 1ur).
Из этих двух соотношений вытекает, что разность во времени прохождения участка АВ волнами 1 и 2 составляет
t1 t 2
2C 2
lru
4C 2
Su,
где DS - площадь фигуры ОАВ. Суммируя те- перь по всем элементарным участкам, для разности времен прихода в П фронтов волн 1 и 2 получим
Здесь S - площадь, ограничиваемая контуром К.
t1 t2
(4S / C 2 )u.
(64)
Различие во времени прихода фронтов означает, что в один и тот же момент време-
ни волны 1 и 2 в П сдвинуты по фазе на величину
j
где - частота излучения.
2pf (t1
t2 )
(8kfS / C 2 )u,
(65)
Наконец, наличие угловой скорости основания проявляется в точке П и как разность частот 1 и 2 волн. Действительно, за время однократного прохождения контура (длину его обозначим L), т.е. за время, равное в первом приближении L/C, периодов волны 2 пройдет в П больше, чем периодов волны 1 на величину (Т - длительность периода)
(t1-t2)T-1=f(t1-t2).
Следовательно, разность частот
D¦=L-1C¦(t1-t2)=(4S/lL)u. (66)
Таким образом, измерение угловой скорости с помощью описанной схемы сводится
к измерению в приемнике разности времен прихода одинаковых фаз встречных волн, ли- бо к измерению разности фаз или рассогласования частот встречных волн. При этом, как следует из приведенных формул, для повышения чувствительности прибора следует уве- личивать площадь, охватываемую контуром, и использовать высокочастотное излучение. По второй причине в приборах используется световое излучение с длиной волны 0,6 мкм.
Если теперь оценить возможную разность времен (64) при приемлемых размерах контура, то окажется, что она составляет величины порядка 10-19 с и менее. Измерителей таких времен не существует. Поэтому в качестве измеряемых величин следует рас-
сматривать только разности фаз и частот.
Далее, как следует из изложенного, для реализации описанной схемы необходимо,
чтобы волны 1 и 2 были когерентными, достаточно интенсивными и слабо затухали.
Источником, удовлетворяющим этим условиям, является лазер, который и использу-
ется в конструкциях оптических гироскопов.