

2.4.2 Синтез астатического наблюдателя для объектов первого порядка с запаздыванием в случае некратного отношения запаздывания и период квантования
Для расчета коэффициентов наблюдателя в соответствии со структурной схемой рис. 2.11 запишем систему разностных уравнений, описывающих динамику контура наблюдения:
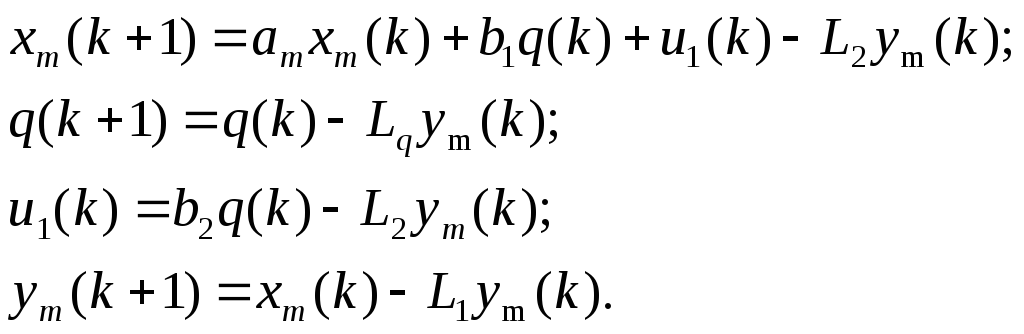 (2.30)
(2.30)
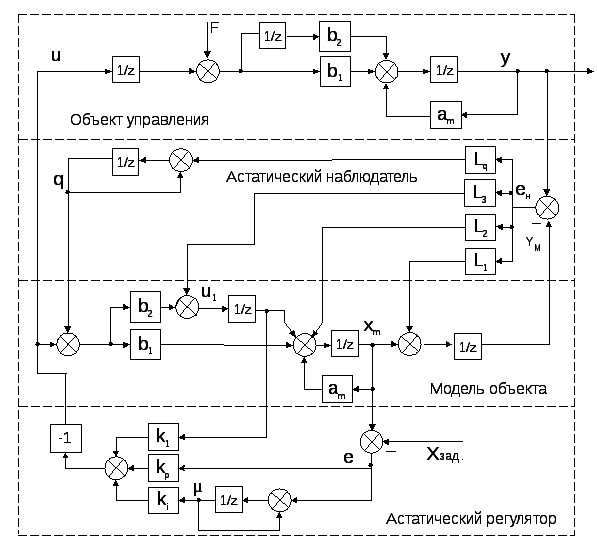
Рис. 2.15.Структурная схемасистемыуправления для М=1 в случае некратного отношения запаздывания к периоду квантования
Характеристическое уравнение этой системы получим на основе определителя
 =0
(2.31)
=0
(2.31)
Потребуем,
чтобы все корни характеристического
уравнения
располагались
в одной точке
![]() ,
т.е. чтобы был только один
варьируемый
параметр,
тогда получим
,
т.е. чтобы был только один
варьируемый
параметр,
тогда получим
![]() =0
(2.32)
=0
(2.32)
Приравнивая
коэффициенты этих уравнений при
одинаковых степенях
![]() ,
получим систему уравнений
,
получим систему уравнений
 (2.33)
(2.33)
Решение системы даёт коэффициенты наблюдателя
 (2.34)
(2.34)

Рис. 2.16.Структурная схемасистемыдля случая произвольного запаздывания
Таким образом, для произвольного запаздывания M (рис. 2.12) получим следующие рекуррентные формулы:
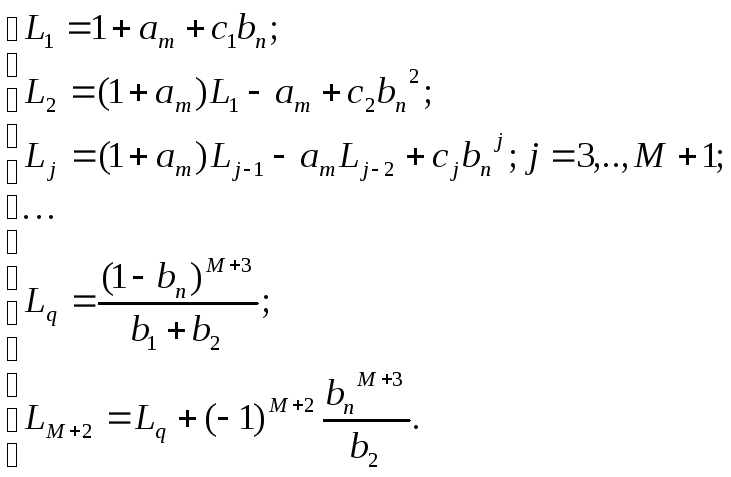 (2.35)
(2.35)
где
![]() ,
,![]() -
число сочетаний из М+3 по j; j=3…M+1.
-
число сочетаний из М+3 по j; j=3…M+1.
Как видно структурной схемы и полученных формул с увеличением запаздывания М структура схемы усложняется и растет число коэффициентов в наблюдателе. Это необходимо учитывать при практической реализации регулятора в микропроцессорном контроллере.
2.4.3. Исследование динамики системы управления модального регулятора с астатическим наблюдателем для объектов первого порядка с запаздыванием
Для этого используем такую программу, что и в п.2.2.6. но подключить к работе астатический наблюдатель полного порядка. Порядок исследования тоже самый, как и в случае модального регулятора со статическим наблюдателем.
На рис. 2.17. показан график отработки задания и возмущения регулятора с астатическим наблюдателем. Как видно на графике, в отличие от регулятора со статическим наблюдателем, регулятор с астатическим наблюдателем полностью компенсирует возмущения и обеспечивает выходной сигнал без статической ошибки. Так, в момент времени t=85с подаем возмущение F= - 15%. Регулятор сразу отрабатывает возмущение и выводит систему в исходное состояние до воздействия возмущения. Переходный процесс имеет вид, приближенный к оптимальному.

Рис. 2.17.график отработки задания и возмущения в системе управления модального регулятора с астатическим наблюдателем

Рис. 2.18.График отработки задания и возмущения в системе управления в случае неточности параметров модели
Далее рассмотрим работу регулятор в случае разных параметрах объекта и модели. На рис. 2.18 показан график отработки задания и возмущения регулятором в случае отличия по параметрам в объекте и модели. В этом случае регулятор хорошо справится с заданием и возмущением. Небольшое колебание вызвано неточностью модели по сравнению с объектом.
Теперь рассмотрим работу регулятор в случае объекта третьего порядка, а модель – первого порядка. Динамики системы управления модального регулятора с астатическим наблюдателем для объекта третьего порядка показаны на рис. 2.19 и рис. 2.20.
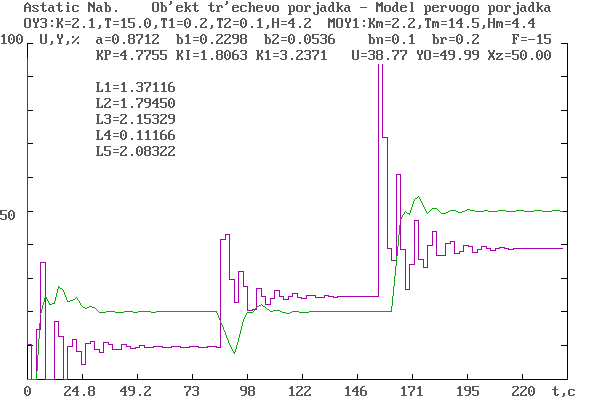
Рис. 2.19.График отработки задания и возмущения в системе управления для объекта третьего порядка.

Рис.2.20.График отработки задания и возмущения в системе управления для объекта третьего порядка.
Глава 3. Синтез модальных регуляторов для объектов второго порядка с запаздыванием
3.1. Цифровые модели объектов второго порядка с запаздыванием
В данном разделе синтезируются модальные регуляторы с наблюдателем для объектов второго порядка с запаздыванием. В структуре модального регулятора будем использовать как статические, так и астатические наблюдатели. Динамическая модель 2-ого порядка с запаздыванием в каналах управления и измерения более точно описывается динамику значительного числа промышленных объектов управления. Сюда входят как многоемкостные инерционные объекты, так и объекты с колебательными свойствами и неминимально-фазовые объекты. В частности, примером неминимально-фазовового объект можно считать процесс регулирования уровня в котлах тепловых электростанций.
Широко распространенной динамической моделью промышленного многоемкостного объекта является инерционная модель второго порядка с запаздыванием в управлении и (или) измерении. Передаточная функция такой модели имеет вид:
![]() (3.1)
(3.1)
где K – коэффициент усиления, T1, Т2 – постоянные времени, τ– эквивалентная величина запаздывания в объекте по каналу управления и измерения. Коэффициент усиления может использоваться как в размерной, так и безразмерной форме (%/%).
Введем
обозначения: ТК
– период квантования,
![]() - отношение запаздывания к периоду
квантования, причем М – целая часть,с
– дробная часть отношения.
- отношение запаздывания к периоду
квантования, причем М – целая часть,с
– дробная часть отношения.
Если
период квантования не кратен величине
запаздывания, то, применяя модифицированное
Z-преобразование [3] к передаточной
функции (3.1), получим описание динамики
объекта в координатах вход
![]() -
выход
-
выход![]() :
:
![]() (3.2)
(3.2)
где коэффициенты объекта вычисляются по формулам:
 (3.3)
(3.3)
Описать динамику объекта второго порядка можно и в пространстве состояний, например, в канонической форме наблюдаемости [5]:
 (3.4)
(3.4)
Здесь
![]() - выход объекта,
- выход объекта,![]() и
и![]() - недоступные для измерения внутренние
переменные объекта. Удобство этого
описания состоит в том, что в нем
используются те же коэффициенты, что и
в модели объекта (3.2). Кроме этого, как
показали расчеты, только использование
этой модели позволяет получить
рекуррентные формулы для вычисления
коэффициентов наблюдателя полного
порядка.
- недоступные для измерения внутренние
переменные объекта. Удобство этого
описания состоит в том, что в нем
используются те же коэффициенты, что и
в модели объекта (3.2). Кроме этого, как
показали расчеты, только использование
этой модели позволяет получить
рекуррентные формулы для вычисления
коэффициентов наблюдателя полного
порядка.