

2.3.2. Синтеза астатического регулятора состояния для объектов первого порядка с запаздыванием в случае кратного отношения запаздывания к периоду квантования
На рис. 2.6 приведена структурная схема контура регулирования на основе астатического регулятора состояния. В данном случае структура этого регулятора совпадает со структурой широко распространенного ПИ-регулятора. Введение интегральной составляющей в регулятор при использовании статического наблюдателя позволяет повысить точность работы всей системы управления.
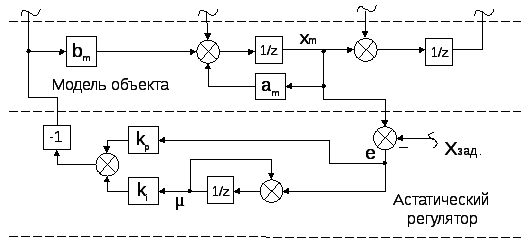
Рис. 2.6.Контура «Модель объекта – астатический регулятор» для расчета параметров регулятора состояния
Методика синтеза, как и ранее, базируется на теории модального цифрового управления. Для этого в соответствии с приведенной схемой (рис. 2.6.) запишем систему разностных уравнений, описывающих динамику замкнутого контура регулирования без учета сигнала задания и корректирующих сигналов от наблюдателя:
 (2.12)
(2.12)
Перепишем (2.12) в виде:
 (2.13)
(2.13)
Согласно теории модального управления, коэффициенты модального регулятора найдем из условия равенства характеристического уравнения замкнутой системы и выбранного типа полинома.
Потребуем,
чтобы система имела заданное расположение
корней (z1,
z2).
Для упрощения расчетов и облегчения
выбора нужного расположения корней
предлагается поместить все корни в одну
точку:
![]() .
.
![]() (2.14)
(2.14)
или в раскрытом виде
![]() (2.15)
(2.15)
где
![]() - корень (кратность два), расположенный
на действительной оси единичной
окружности комплексной плоскости Z.
Приравнивая коэффициенты при одинаковых
степеняхz,
получим систему линейных алгебраических
уравнений, из которой определим
коэффициенты регулятора
- корень (кратность два), расположенный
на действительной оси единичной
окружности комплексной плоскости Z.
Приравнивая коэффициенты при одинаковых
степеняхz,
получим систему линейных алгебраических
уравнений, из которой определим
коэффициенты регулятора
 (2.16)
(2.16)
2.3.3. Синтез статического наблюдателя для объектов первого порядка с запаздыванием в случае некратного отношения запаздывания к периоду квантования
В случае некратного отношения запаздывания к периоду квантования, описание объекта первого порядка имеет вид (2.3). В этом случае появляется дополнительная координата u1(k) векторе состояния модели объекта. Для расчета коэффициентов наблюдателя в соответствии со структурной схемой (рис. 2.7.) запишем систему разностных уравнений, описывающих динамику только контура наблюдения:
 (2.17)
(2.17)
Характеристическое уравнение:
 (2.18)
(2.18)
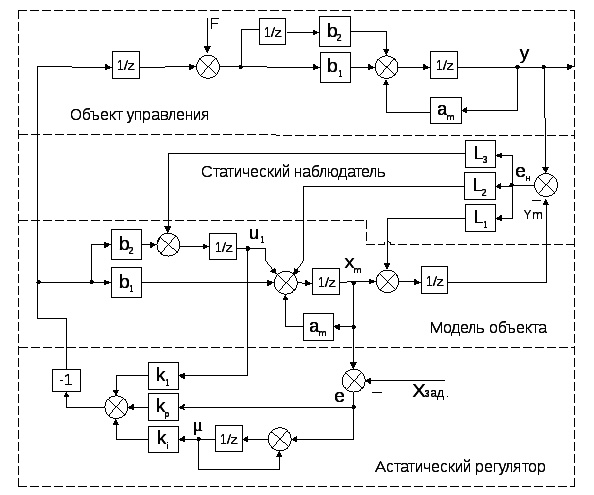
Рис. 2.7.Структурная схемасистемыуправления объекта первого порядка с запаздыванием в случае некратного отношения запаздывания к периоду квантования (для М=1)
Решая это уравнение, получим коэффициенты наблюдателя:
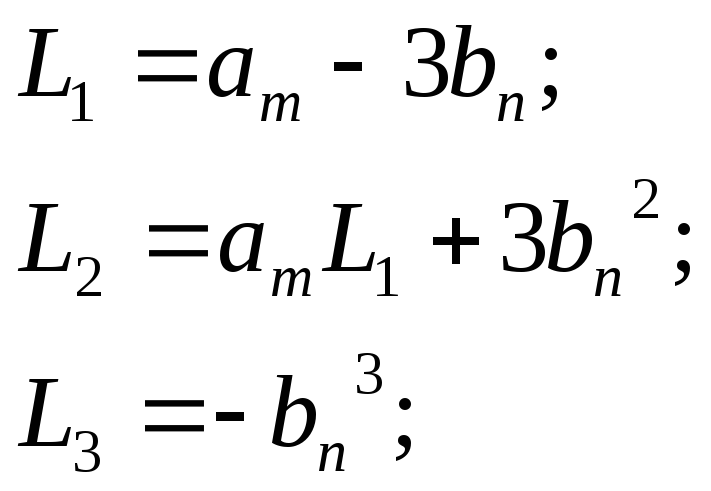 (2.19)
(2.19)
Аналогичным методом, для расчета наблюдателя при других значениях запаздывания, запишем системы уравнений, описывающих динамику контура наблюдения в соответствии со схемой, показанной на рис. 2.8. Решая эти уравнения для разных значений М, получим рекуррентные формулы для коэффициентов наблюдателя.
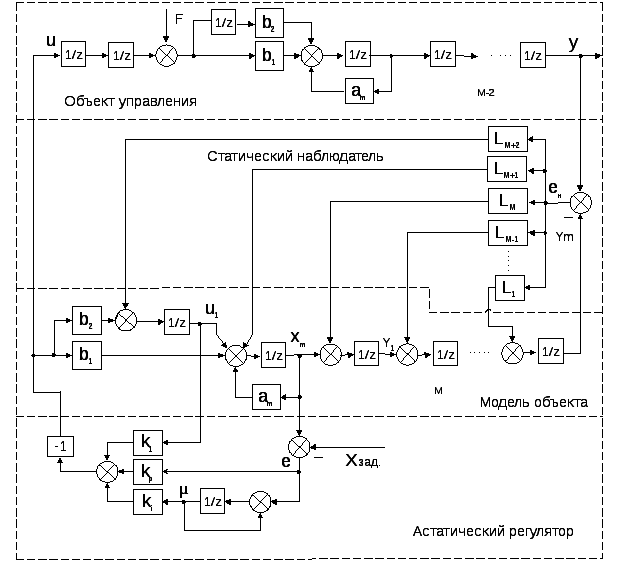
Рис.2.8.Структурная схемасистемыуправления объекта первого порядка с запаздыванием в случае некратного отношения запаздывания к периоду квантования (для произвольного М)
 (2.20)
(2.20)
где
![]() ,
,![]() -
число сочетаний из М+1 по j; j=2..M+1.
-
число сочетаний из М+1 по j; j=2..M+1.
2.3.4. Синтез астатического модального регулятора состояния для объектов первого порядка с запаздыванием в случае некратного отношения запаздывания к периоду квантования
Проведем синтез модального регулятора состояния для случая некратного отношения запаздывания к периоду квантования. Для этого в соответствии с приведенной структурной схемой (рис.2.8.) запишем систему разностных уравнений, описывающих динамику замкнутого контура регулирования без учета сигнала задания х3ад.:
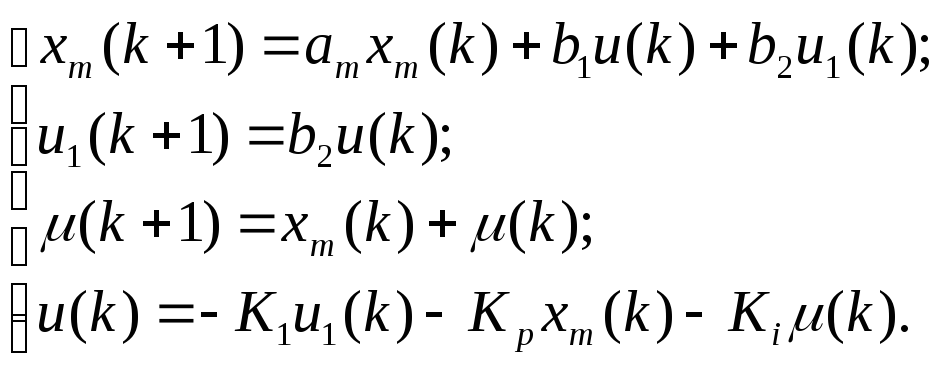 (2.21)
(2.21)
Перепишем (2.21) в виде:
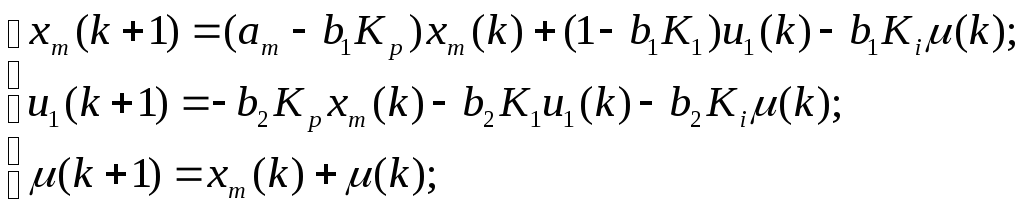 (2.22)
(2.22)
Коэффициенты модального регулятора найдем из условия:
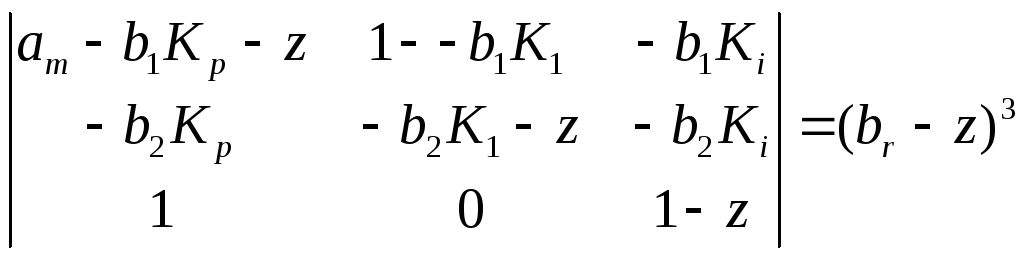 (2.23)
(2.23)
или в раскрытом виде
 (2.24)
(2.24)
где
![]() - корень (кратность три), расположенный
на действительной оси единичной
окружности комплексной плоскости Z.
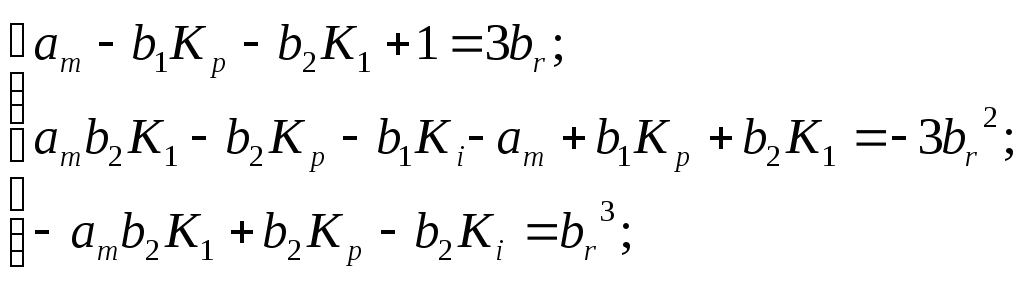
Приравнивая коэффициенты при одинаковых
степенях z, получим систему линейных
алгебраических уравнений, из которой
определим
- корень (кратность три), расположенный
на действительной оси единичной
окружности комплексной плоскости Z.
Приравнивая коэффициенты при одинаковых
степенях z, получим систему линейных
алгебраических уравнений, из которой
определим
 (2.25)
(2.25)