

1.4. Постановка задачи исследования
На основание проведенного обзора метод синтеза регуляторов для объектов с запаздыванием возникает необходимость разработать более простые и эффективные методы синтеза и расчета регуляторов, ориентированные на реализацию их в микропроцессорных контроллерах. Для достижения этой цели необходимо решить в диссертации следующие задачи:
- разработать обобщенную структурную схему цифрового регулятора для объекта с запаздыванием на основе наблюдателя полного порядка и регулятора состояния;
- разработать обобщенную структурную схему цифрового регулятора для объекта с запаздыванием на основе наблюдателя полного порядка и оптимального по быстродействию регулятора;
- разработка структурной схемы регулятора для объекта первого порядка с запаздыванием в каналах управления и измерения;
- разработать методику и провести синтез модального цифрового наблюдателя полного порядка для статического и астатического вариантов;
- разработать методику и провести синтез цифрового астатического регулятора для модели объекта без запаздывания;
- разработать структурную схему и алгоритм работы цифрового регулятора для объекта первого порядка с запаздыванием на основе наблюдателей полного порядка, астатического регулятора состояния.
- разработать структурную схему и алгоритм работы цифрового регулятора для объекта первого порядка с запаздыванием на основе наблюдателей полного порядка и оптимального по быстродействию регулятора;
- разработка структурной схемы регулятора для объекта второго порядка с запаздыванием в каналах управления и измерения;
- разработать методику и провести синтез модального цифрового наблюдателя полного порядка для статического и астатического вариантов;
- разработать методику и провести синтез цифрового астатического регулятора состояния для модели объекта без запаздывания;
- разработать структурную схему и алгоритм работы цифрового регулятора для объекта второго порядка с запаздыванием на основе наблюдателей полного порядка и астатического регулятора состояния;
- разработать структурную схему и алгоритм работы цифрового регулятора для объекта второго порядка с запаздыванием на основе наблюдателей полного порядка и оптимального по быстродействию регулятора;
- разработать комплекс программ моделирования систем управления с различными типами модальных регуляторов;
- на основе этого комплекса провести исследование динамики процессов регулирования в системах первого и второго порядка с запаздыванием. Оценить влияние на динамику системы отклонений параметров моделей от их номинальных значений в объектов. Оценить влияние на динамику системы повышение порядка объекта управления по отношению к используемой в регуляторе модели объекта;
- разработать рекомендации по практическому применению модальных цифровых регуляторов;
- испытать работу модального регулятора на промышленном объекте управления.
Глава 2. Синтез модальных регуляторов для объектов первого порядка с запаздыванием
2.1. Разработка обобщенной структурной схемы регулятора с наблюдателем для объектов с запаздыванием
Как известно [3], одним из подходов к построению систем управления при неполной информации об объекте является введение в структуру регулятора наблюдающего устройства, предназначенного для восстановления всех (наблюдатель полного порядка) или недостающих (наблюдатель пониженного порядка) координат вектора состояния объекта. Будем использовать наблюдателя полного порядка для формирования упрежденных координат вектора состояния объекта. Это можно осуществить, если в схеме с наблюдателем переместить суммарное запаздывание за динамическую часть модели объекта, так, как это показано на рис. 2.1. Такой подход, как будет показано ниже, имеет ряд преимуществ перед ранее применяемыми схемами формирования упрежденных координат объекта.
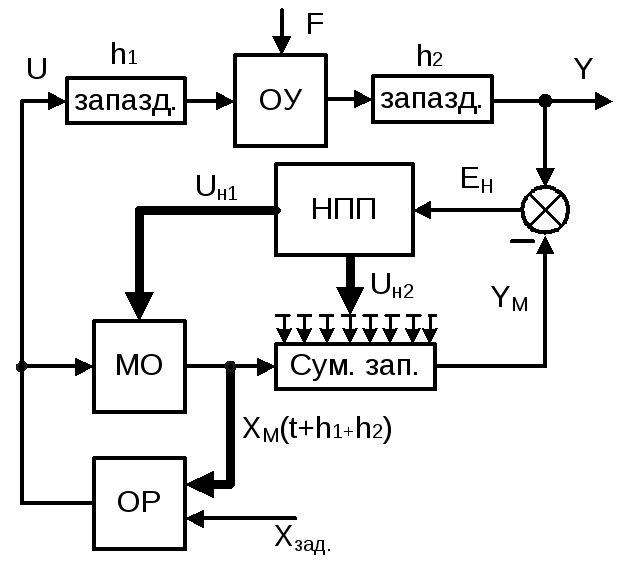
Рис. 2.1.Обобщенная структурная схема регулятора с наблюдателем для объекта с запаздыванием
На Рис. 2.1 обозначены: НПП - наблюдатель полного порядка, МО - модель объекта, ОР – оптимальный регулятор, ОУ - объект управления.
Соответствие движений в модели и объекте достигается за счет использования статического или астатического наблюдателя полного порядка. Формирование управляющего сигнала ведется по сигналам с модели объекта без запаздывания. Это приводит к тому, что повышается быстродействие и точность регулирования в контуре «МО – ОР», и, как следствие, улучшается качество управления во всей системе регулирования. Необходимо заметить, что наряду с получением упрежденного выхода мы получаем и значения оценок недоступных для измерения упрежденных координат вектора состояния объекта. Это позволяет применить более совершенные по структуре линейный или оптимальный по быстродействию регулятор состояния.
Преимущества данной структурной схемы - это возможность раздельного расчёта контура наблюдения и контура регулирования. Наблюдатель полного порядка фактически позволяет компенсировать как координатные, так и параметрические возмущения, действующие на систему.
Если возмущающее воздействие F отсутствует или имеет небольшую амплитуду, то рекомендуется использовать статический наблюдатель (СНПП), как более быстродействующий, более простой в расчетах и обеспечивающий большие запасы устойчивости в системе. Примерами объектов с малым уровнем возмущений можно считать различные системы термостатирования, для которых актуальными являются задачи точного поддержания температуры и точного воспроизведения заданной программы нагрева и охлаждения.
Для объектов со значительным уровнем возмущений следует применять астатический наблюдатель (АНПП), формирующий оценку действующего на объект возмущения и полностью его компенсирующий.
Если
в выходном сигнале объекта присутствует
шум, то наблюдатель может выполнять
также фильтрующие функции, обеспечивая
получение оценок сигналов
![]() и
и![]() с малой дисперсией (шумовой составляющей).
с малой дисперсией (шумовой составляющей).
Реализацию предложенной структуры системы управления объектом с запаздыванием удобнее вести в цифровом виде, ориентируясь на использование микропроцессорных регулирующих контроллеров.