

5.3. Исследование зависимости статической ошибки от отношения запаздывания к периоду квантования.
Известно, что в системе управления регулятора со статическим наблюдателем присутствует некоторая статическая ошибка. Это подтверждается результатами исследования, проводимыми в разделах главах 2 и 3. С целью установить зависимости значения статической ошибки от величины отношения запаздывания к периоду квантования проводим соответствующие исследования. Вначале проводим исследования работы модального регулятор со статическим наблюдателем для объектов первого порядка. Используя разработанные комплексы программ, а именно программа под именем MR_MO1.cpp, варьируя значения запаздывания и рассчитывать статические ошибки на выходе имеем следующие результаты:
|
τ / T |
0 |
0.05 |
0.075 |
0.125 |
0.15 |
0.2 |
0.22 |
0.3 |
0.35 |
0.4 |
0.5 |
|
Δ Y |
0 |
0.587 |
1.023 |
1.023 |
1.347 |
1.347 |
1.856 |
1.856 |
1.856 |
2.292 |
2.292 |
|
τ / T |
0.54 |
0.6 |
0.66 |
0.67 |
0.7 |
0.79 |
0.8 |
0.85 |
0.95 |
0.95 |
1.00 |
|
Δ Y |
2.668 |
2.668 |
2.668 |
2.991 |
2.991 |
2.291 |
3.270 |
3.270 |
3.270 |
3.510 |
3.510 |
|
τ / T |
1.07 |
1.1 |
1.15 |
1.2 |
1.33 |
1.34 |
1.5 |
1.6 |
1.7 |
1.8 |
1.9 |
|
Δ Y |
3.716 |
3.716 |
3.716 |
3.894 |
3.894 |
4.18 |
4.18 |
4.29 |
4.29 |
4.392 |
4.476 |
Таблица 1. Значения статической ошибки при разных значениях τ / T
По полученным результатам ( таблица 1) аппроксимацируем с момощью математического аппарата MathCAD (version 11) получаем линию, отображаем зависимость величины статической ошибки от отношения τ / T. Ниже приведен фрагмент документа MathCAD, в котором осуществлена обработка полученных данных.
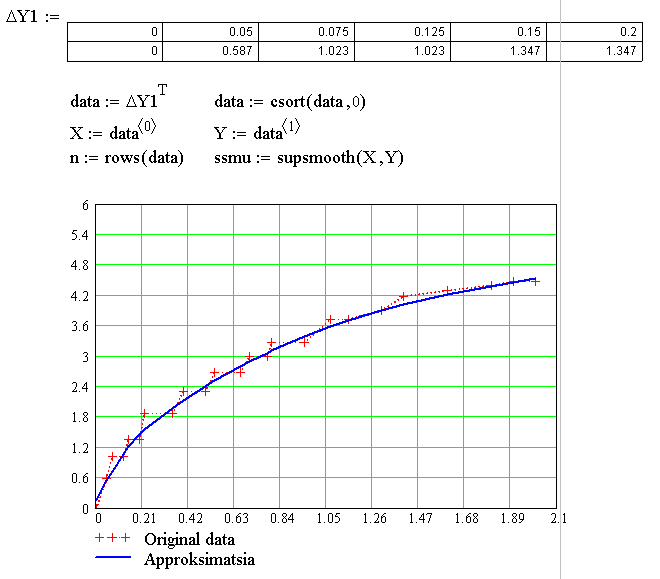
Рис. 5. 12. Аппроксимация зависимости статической ошибки от значения τ / T
Для объекта второго порядка, будем использовать программу MR_MO2.cpp для исследований. По аналогичным методам, получаем следующие данные.
|
τ / T |
0 |
0.06 |
0.1 |
0.135 |
0.2 |
0.3 |
0.4 |
0.425 |
0.5 |
0.55 |
|
Δ Y |
0 |
0.370 |
0.972 |
0.972 |
1.845 |
1.845 |
1.845 |
2.76 |
2.76 |
2.76 |
|
τ / T |
0.6 |
0.625 |
0.7 |
0.83 |
0.9 |
1.05 |
1.2 |
1.25 |
1.3 |
1.4 |
|
Δ Y |
2.76 |
3.496 |
3.496 |
4.068 |
4.068 |
4.493 |
4.493 |
4.801 |
4.801 |
4.801 |
|
τ / T |
1.45 |
1.47 |
1.55 |
1.66 |
1.75 |
1.80 |
1.88 |
1.9 |
1.95 |
2.05 |
|
Δ Y |
5.019 |
5.019 |
5.019 |
5.172 |
5.172 |
5.172 |
5.278 |
5.278 |
5.278 |
5.278 |
Таблица 2. Значения статической ошибки при разных значениях τ / T
Используя систему MathCAD, обрабатываем полученных данных (таблица 2) можно получать следующую линию, отображаем зависимость величины статической ошибки от отношения τ / T.
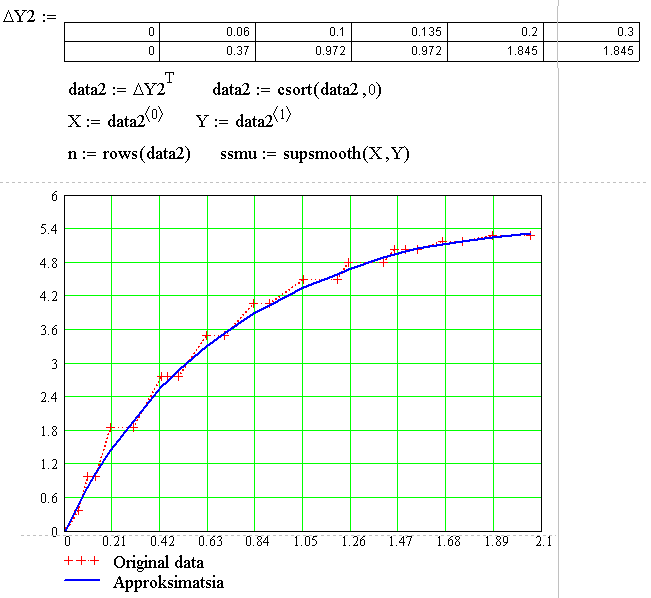
Рис. 5. 13. Аппроксимация зависимости статической ошибки от значения τ / T
Таким образом, в обоих случаях (первого и второго порядка) зависимость величины статической ошибки от отношения τ / T имеет вид, приближенный к прямой линии.