

4.3.2. Исследование динамики системы управления модального регулятора со статическим наблюдателем для объектов второго порядка с запаздыванием
На рис.7 показаны графики отработки задания и возмущения в оптимальной по быстродействию цифровой системе управления объекта второго порядка с запаздыванием.
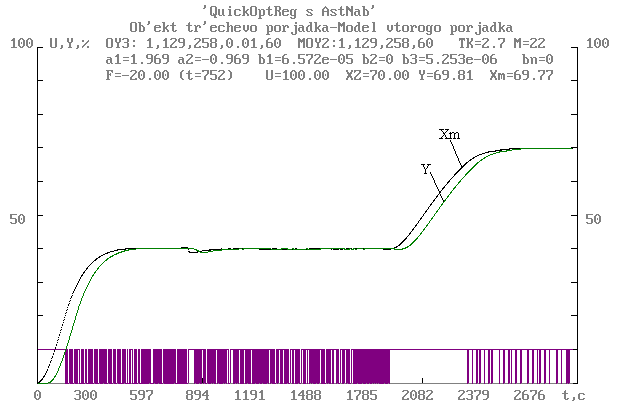
Рис.4.7. График отработки задания и возмущения системы управления.
Как видно из графика процесс носит оптимальный по быстродействию характер. Однако при отработке возмущения наблюдается появление небольшой статической ошибки. Так, наприме, при возмущения -20%, величина статической ошибки составляет 0.19%, что на практике вполне допустимо.
Глава 5. Исследование динамики и практическая реализация модальных регуляторов с наблюдающими устройствами
В этом разделе мы приведем исследование работы синтезированных модальных регуляторов с наблюдателем для разных классов объектов и в разных условиях. А также приведем реализацию его на практике для управления процессом дозирования аммиака в питательный тракт воды, подаваемой в котельно-турбинный цех Ефремовской ТЭЦ Тульской области.
5.1. Описание комплекса программ, разработанных для исследований динамики систем управления с разработанными регуляторами.
Для целей исследования динамики систем управления различными объектами с разработанными регуляторами были написаны 6 программ на языке программирования С++:
- первая программ написана для исследования работы модального регулятора с наблюдателем для объектов первого порядка с запаздыванием (файл текста программ - MR_MO1.cpp);
- вторая – для модального регулятора с наблюдателем для объектов второго порядка с запаздыванием, а также для объекта типа колебательного звена и неминимально-фазовового объекта (файл текста программ - MR_MO2.cpp, MR_MO2KZ.cpp, MR_MO2MF.cpp);
- третья – для оптимального по быстродействию регулятора с наблюдателем для объектов первого порядка с запаздыванием(файл текста программ - OBR_MO1.cpp);
- четвертая – для оптимального по быстродействию регулятора с наблюдателем для объектов второго порядка с запаздыванием (файл текста программ - OBR_MO2.cpp).
Структура этих программ имеет общий вид. Так, во всех программах присутствуют следующие классы и подпрограммы:
1. Класс объекта (первого, второго и третьего порядка с запаздыванием, объекта типа колебательного звена и неминимально-фазовового объекта). В этом классе имеется 2 подпрограммы (по терминологии объекто-ориентированного программирования эти подпрограммы называют методами класса). Первая подпрограмма рассчитывает коэффицентов (a1, a2, b1, b2, b3, b4) цифрового описания объекта из параметров непрерывной формы (K,T1,T2,T3,H). Вторая подпрограмм рассчитывает выходной значения от входного.
2. Класс наблюдателя полного порядка (статического и астатического для объектов первого и второго порядка с запаздыванием). В этом классе для каждого случая (статического или астатического наблюдателя) тоже имеется 2 подпрограммы. Первая подпрограмма рассчитывает коэффицентов наблюдателя полного порядка (L1, L2,… LM+4, Lq) в зависимости от типа наблюдателя и описания модели объекта. Вторая подпрограмм введет расчет внутренние переменные состояния модели объекта (x1, x2, x3…)
3. Класс регулятора (модального для объектов первого и второго порядка с запаздыванием, оптимального по быстродействию для объектов первого и второго порядка с запаздыванием). Здесь формируются управляющие сигналы (по соответствующему алгоритму регулятора) для передачи во вход объекта;
4. Класс графика. Здесь выполняет масштабирования экран в зависимости от значения период квантования, рисует оси и выводит графики на экран.
5. Основная программа, где реализуется алгоритма управления, вызывая соответствующие подпрограмм и получит управления от пользователя.