

5.2. Исследование динамики объекта колебательного вида и неминимально-фазовового объекта.
5.2.1. Исследование динамики объекта колебательного вида
В этом разделе будем исследовать динамики систем управления разработанных регуляторов для объекта колебательного типа и неминимально-фазового объекта. Для этого сначала посмотрим цифровые описания этих объектов.
Передаточная функция колебательного звена имеет вид
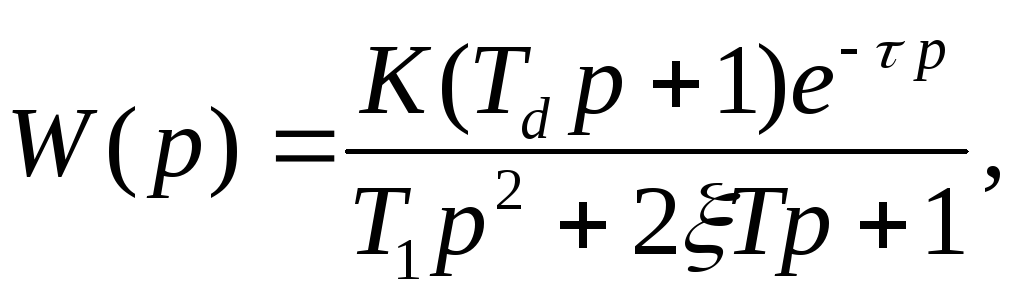 (5.1)
(5.1)
Для удобства перепишем (5.1) в виде
![]() (5.2)
(5.2)
Как отметилось выше, применяя модифицированное Z-преобразование объект колебательного вида (5.1) тоже можно представить в дискретном описании в координатах вход-выход:
![]() (5.3)
(5.3)
Ввиду громоздки в описании коэффициентов этого описания, проводим их через вспомогательные формулы:
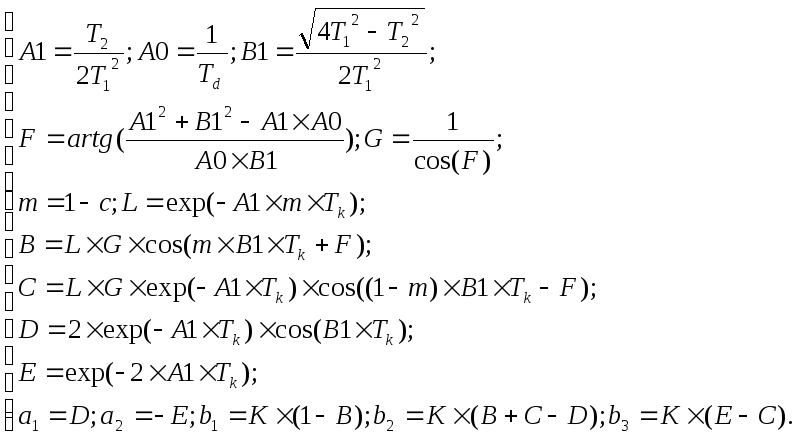 (5.4)
(5.4)
Здесь
обозначены: ТК
– период
квантования,
![]() - отношение запаздывания к периоду
квантования, причемМ
– целая часть, с
– дробная часть отношения.
- отношение запаздывания к периоду
квантования, причемМ
– целая часть, с
– дробная часть отношения.
Отметим что описание колебательного звена в пространстве состояния вход-выход (5.2) совпадает с тем, что у инерционного объекта второго порядка. Для исследования мы использовать программу MR_MO2KZ.cpp, где вместо объекта второго порядка будет колебательное звено. На рис. 5.1. показаны графики отработки задания и возмущения в системе управления модальным регулятором со статическим наблюдателем.
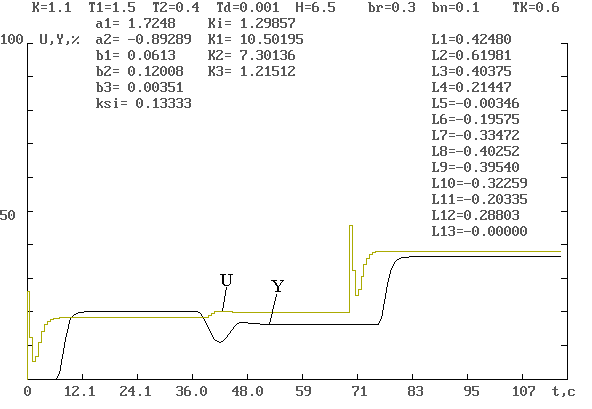
Рис. 5.1. Графики отработки задания и возмущения модальным регулятором со статическим наблюдателем полного порядка
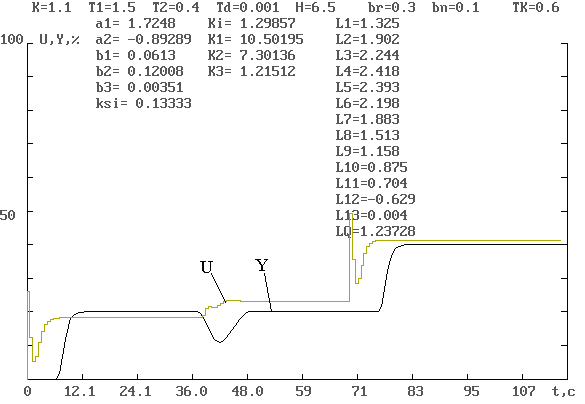
Рис. 5.2. Графики отработки задания и возмущения модальным регулятором
с астатическим наблюдателем полного порядка (возмущение F=-5)
Как видно из графика (рис. 5. 1), имеется статической ошибки, что характерно для статического наблюдателя. А на рис. 5. 2 показаны графики отработки задания и возмущения в системе управления модальным регулятором с астатическим наблюдателем. Как видно, статической ошибки нет. Заметим что, в обоих случаях объект имеет одинаковые параметры. И возмущение, действующее на систему одинаковое, но статический наблюдатель не в состоянии компенсировать его, а астатический наблюдатель быстро переводит систему в предыдущее состояние.
5.2.2. Исследование динамики неминимально-фазового объекта
Аналогично предыдущий случай сначала приводим цифровое описание неминимально-фазового объекта.
![]() . (5.5)
. (5.5)
В пространстве состояния вход-выход описание неминимально-фазового объекта имеет вид
![]() (5.6)
(5.6)
коэффициенты
вычисляются по тем же формулам, что и в
(5.4) за исключением того, что вместо
![]() будем
поставить
будем
поставить![]() .
.
На рис. 5. 3 и 5. 4 показаны графики отработки задания и возмущения регулятором со статическим (рис. 5.3) и с астатическим (рис. 5.4) наблюдателем.
Как правильно, при настройке системы управления, фиксируем bn и варьируем br так, чтобы обеспечил необходимое качество. С целью выяснения значения корни br на динамики системы, фиксируем все параметры и варьируем br ,полученные графики показан на рисунках.
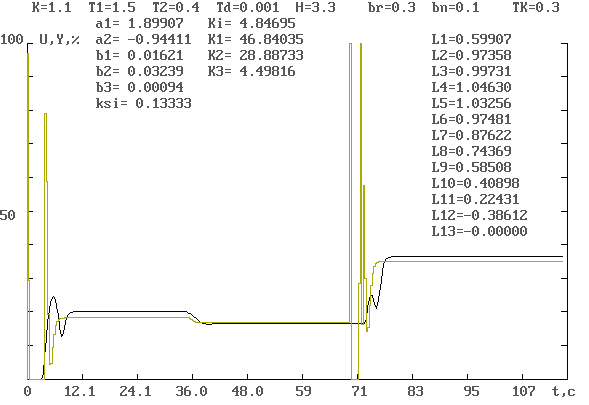
Рис. 5. 3. Графики отработки задания и возмущения модальным регулятором со статическим наблюдателем полного порядка
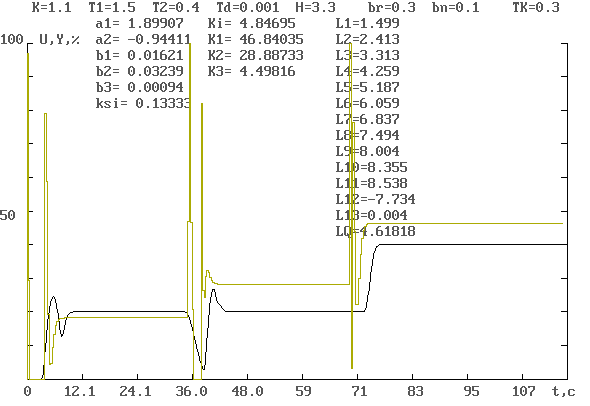
Рис. 5. 4. Графики отработки задания и возмущения модальным регулятором
с астатическим наблюдателем полного порядка (возмущение F=-5)

Рис. 5. 5. Динамика системы управления при br=0.2

Рис. 5. 6. Динамика системы управления при br=0.4

Рис. 5. 7. Динамика системы управления при br=0.5
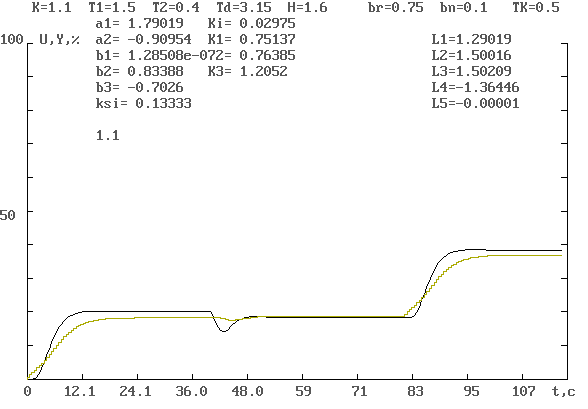
Рис. 5. 8. Динамика системы управления при br=0.75
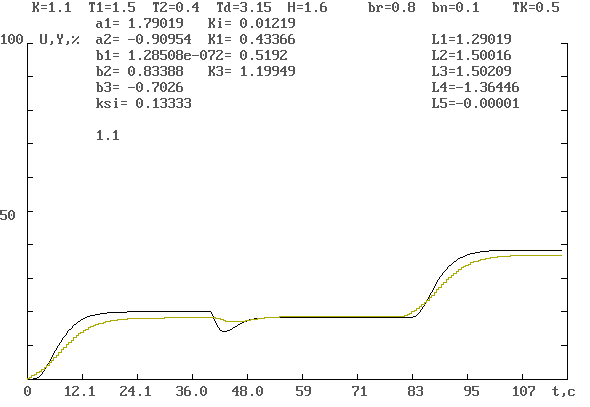
Рис. 5. 9. Динамика системы управления при br=0.8
Легко увидеть на графиках, что при увеличении br переходный процесс становится плавне, а при малых значениях, наблюдается броски переходного процесса, и при br = 0.6-0.75 динамика получается лучше всего, переходный процесс в этом случае имеет вид, очень близкий к оптимальному процессу.
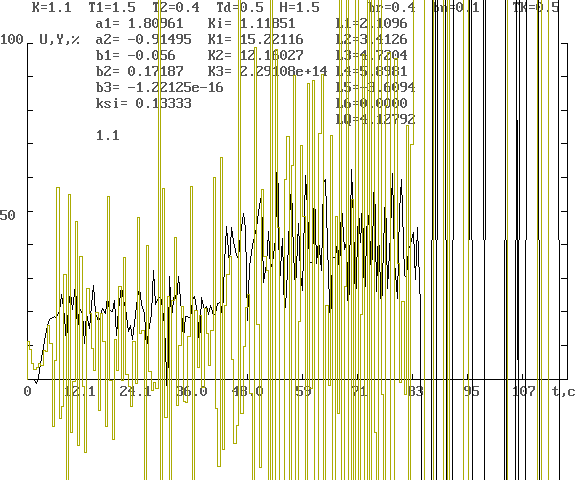
Рис. 5. 10. Неустойчивый процесс при большом запаздывании
Так же при исследовании обнаружен следующий по отношению между запаздыванием h и значением корни характеристического уравнения br . При увеличении запаздывания становится все более форсирующее и при некотором значении h система потеряет устойчивость и процесс становится расходящим. Путем уменьшения br мы можем придать системе некую устойчивость На рис. 5. 10 показан неустойчивый процесс в связи с большим запаздыванием, а на рис. 5. 11 показан устойчивый процесс после регулирования br с сторону уменьшения
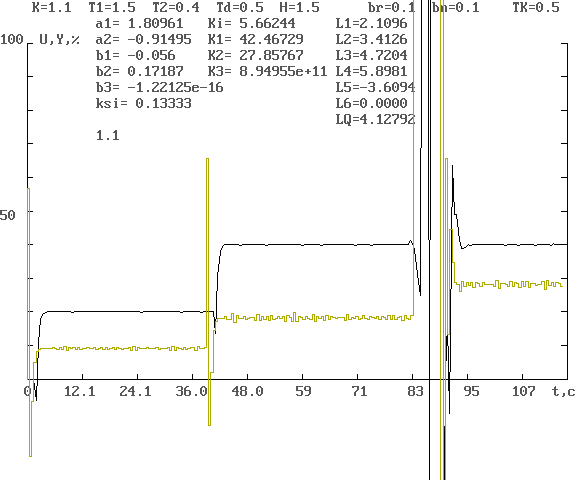
Рис. 5. 11. Устойчивый процесс после уменьшения br
Таким образом, путем выбрать подходящее значение br можно добиться требуемые качества управления и увеличить устойчивость систем в целом.