

3.2.3 Синтез статического наблюдателя для объектов 2-ого порядка с запаздыванием в случае некратного отношения запаздывания и период квантования
Для расчета коэффициентов наблюдателя в соответствии со структурной схемой (рис. 3.4.) запишем систему разностных уравнений, описывающих динамику только контура наблюдения:
 (3.20)
(3.20)
Характеристическое уравнение этой системы получим на основе определителя:
 =0.
(3.21)
=0.
(3.21)
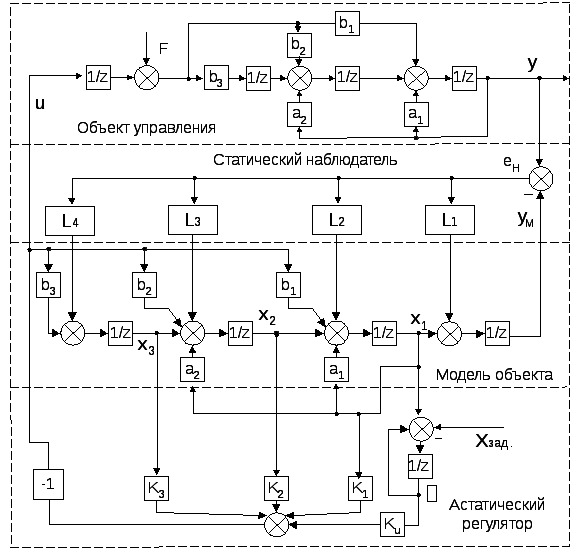
Рис. 3.4. Структурная схемасистемыуправления объектом с запаздыванием в случае некратного отношения запаздывания к периоду квантования (для М=1)
Раскрывая
и приравнивая коэффициенты этих уравнений
при одинаковых степенях ![]() ,
и решать систему уравнений, получаем:
,
и решать систему уравнений, получаем:
 (3.22)
(3.22)
Аналогично выведем формулы вычисления коэффициентов наблюдателя для величины запаздывания М=2. В соответствии со структурной схемой (рис. 3.5) запишем систему разностных уравнений, описывающих динамику только контура наблюдения:
 (3.23)
(3.23)

Рис. 3.5.Структурная схемасистемыуправления объектом 2-ого порядка с запаздыванием (для М=2)
Запишем
характеристическое
уравнение,
приравнивая
коэффициенты этих уравнений при
одинаковых степенях
![]() ,
получим систему уравнений, решение
которой получаем коэффициенты наблюдателя:
,
получим систему уравнений, решение
которой получаем коэффициенты наблюдателя:
 (3.24)
(3.24)

Рис. 3.6.Структурная схемасистемыуправления объектом 2-ого порядка с запаздыванием (для произвольного запаздывания М)
Для произвольного значения запаздывания М (Рис.3.6), по аналогичным методам запишем разностные уравнения:
 (3.25)
(3.25)
и характеристическое уравнение этой системы, решение которого даёт коэффициенты наблюдателя.
![]() =0.
(3.26)
=0.
(3.26)
Таким образом, для произвольного запаздывания M получим следующие рекуррентные формулы для вычислений коэффициентов статического наблюдателя:
 (3.27)
(3.27)
где
![]() ,
,![]() -
число сочетаний из М+3 по j.
-
число сочетаний из М+3 по j.
3.2.4. Синтез астатического регулятора состояния для объектов 2-ого порядка с запаздыванием в случае некратного отношения запаздывания и период квантования
Расчета параметра регулятора в случае некратного отношения запаздывания к величине периода квантования введется по той же методике, как и в разделе 3.2.2. Для этого, запишем систему разностных уравнений, определяющих динамику только контура регулирования:
 (3.28)
(3.28)
Перепишем (3.28) в виде:
 (3.29)
(3.29)
Коэффициенты регулятора вычислим из равенства характеристического уравнения замкнутой системы и выбранного типа полинома для случая кратных корней:
![]() =0.
(3.30)
=0.
(3.30)
или :
 (3.31)
(3.31)
Раскрываем (3.31) и приравнивая коэффициенты при одинаковых степенях z, получим систему линейных алгебраических уравнений, из которой найдем:
![]() (3.32)
(3.32)
Остальные три коэффициента регулятора определим из решения системы алгебраических уравнений
 (3.33)
(3.33)
Аналитическое решение системы (3.33) можно получить, вычислив соответствующие определители. Тогда оставшиеся коэффициенты будут равны



3.2.5. Исследование динамики системы управления модального регулятора со статическим наблюдателем для объектов второго порядка с запаздыванием
Проводим исследование динамики системы управления модального регулятора со статическим наблюдателем для объектов второго порядка с запаздыванием.
Используем комплексную программу, написанную для объектов второго порядка MR_MO2. (исходный код файла MR_MO2.cpp).
Вначале рассмотрим случай, когда объект управления описывается динамической моделью второго порядка с запаздыванием, то есть имеет одинаковый порядок что и модель. На рис. 3.7. показан график отработки задания и возмущения в системе управления модального регулятора со статическим наблюдателем. Как видно на графике, регулятор точно отработает задание и возмущение без статической ошибки. В этом случае это объясняется тем, что объект и модель имеют одни и те же параметры и порядок. И на систему не действуют никакие возмущения. В противном случае, имелось бы статическая ошибка, вызвана внешним воздействием, На рис.3.8. показана динамика системы при воздействии возмущения. В начале регулятор точно отработал задание Xзад.=20% без ошибки, что объясняется присутствием астатический звено (интегратор) в самом регуляторе состояния. А компенсации возмущения обычно берет на себя наблюдатель, но в нашем случае наблюдатель статический, поэтому при действии возмущения система не может восстановит прежнее значение выходной величины.

Рис. 3.7.График отработки задания в системе управления модального регулятора со статическим наблюдателем

Рис. 3.8.График отработки задания и возмущения в системе управления модального регулятора со статическим наблюдателем
Далее рассмотрим работу регулятор в случае разных параметрах объекта и модели. На рис. 3.9 показан график отработки задания и возмущения регулятором в случае отличия по всем трем параметрам: коэффициент усиления, постоянная времени и запаздывания в объекте и модели. В этом случае наблюдается статическая ошибка выходного значения от заданного, что объясняется наличием статический наблюдатель в структуре регулятор.

Рис. 3.9.График отработки задания и возмущения в системе управления в случае неточности параметров модели.
Теперь рассмотрим работу регулятор в случае объекта третьего порядка, а модель – первого порядка. Динамики системы управления модального регулятора со статическим наблюдателем для объекта третьего порядка показаны на рис. 2.10 и рис. 2.11.
Эти графики имеют вид, почти похожий на графики рис. 2.8. и рис. 2.9. На рис. 3.10 регулятор отработает только задание, благодаря точности модели, система отработает задание без ошибки.

Рис. 3.10.График отработки задания и возмущения в системе управления для объекта третьего порядка

Рис. 3.11.График отработки задания и возмущения в системе управления для объекта третьего порядка
А на рис. 3.11 имеется место статической ошибки. Ниже, в главе 5 приведена таблица зависимости статическая ошибка от отношения запаздывания к постоянной времени, а также рекомендации по использованию астатического наблюдателя.