

2.3.5. Исследование динамики системы управления модального регулятора со статическим наблюдателем для объектов первого порядка с запаздыванием
В этом разделе будем исследовать динамики системы управления, в которой используется только что синтезированный модальный регулятор со статическим наблюдателем.
Для этого используем написанную в языке С++ комплексную программу (исходный код файла MR_MO1.cpp).
Для начала рассмотрим случай, когда объект управления описывается динамической моделью первого порядка с запаздыванием, то есть имеет одинаковый порядок что и модель. На рис. 2.9. показан график отработки задания и возмущения в системе управления модального регулятора со статическим наблюдателем. Для убеждения в том, что регулятор точно работает, сначала возьмем объект, который идентичен по параметрам по сравнению с моделью. Как видно на графике, регулятор точно отработает задание и возмущение без статической ошибки.

Рис. 2.9.График отработки задания и возмущения в системе управления модального регулятора со статическим наблюдателем.
Далее рассмотрим работу регулятор в случае разных параметрах объекта и модели. На рис. 2.10 показан график отработки задания и возмущения регулятором в случае отличия по всем трем параметрам: коэффициент усиления, постоянная времени и запаздывания в объекте и модели. В этом случае наблюдается статическая ошибка выходного значения, что объясняется наличием статический наблюдатель в структуре регулятор.
Величина статической ошибки, как будет показано в главе 5 почти пропорционально зависит от отношения запаздывание к постоянной времени, и конечно от неточность в параметрах модели.
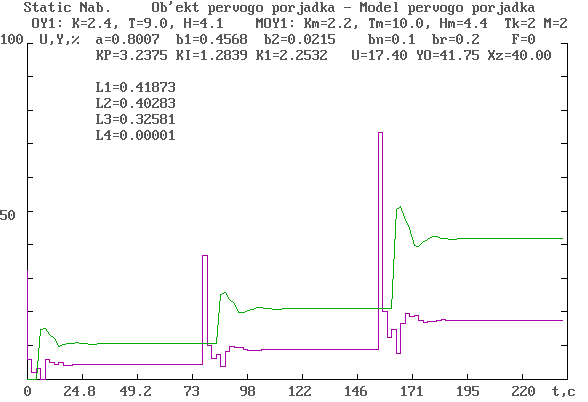
Рис. 2.10.График отработки задания и возмущения в системе управления в случае неточности параметров модели.
Теперь рассмотрим работу регулятор в случае объекта третьего порядка, а модель – первого порядка. Динамики системы управления модального регулятора со статическим наблюдателем для объекта третьего порядка показаны на рис. 2.11 и рис. 2.12.

Рис. 2.11.График отработки задания и возмущения в системе управления для объекта третьего порядка.

Рис. 2.12.График отработки задания и возмущения в системе управления для объекта третьего порядка.
Смотря на эти графики можно сказать, что в обоих случаях присутствуют статическая ошибки, при чем в случае рис. 2.11 ошибка меньше чем в рис. 2.12, что объясняется степенью точности модели.
Так же можно сказать, что для объекта первого динамики системы имеет лучшие характеристики по сравнению с объектом третьего порядка.
2.4. Синтез модального регулятора с астатическим наблюдателем для объектов первого порядка с запаздыванием
2.4.1. Синтез астатического наблюдателя для объектов первого порядка с запаздыванием в случае кратного отношения запаздывания к периоду квантования
Введение в схему наблюдателя цифрового интегратора позволяет получить на его выходе оценку возмущения, действующего на объект управления и обеспечить отработку сигнала задания с нулевой статической ошибкой даже при использовании приближенной модели объекта. Для расчета коэффициентов наблюдателя в соответствии со структурной схемой Рис.2.9. запишем систему разностных уравнений, описывающих динамику контура наблюдения (М=1)
 (2.26)
(2.26)
Характеристическое уравнение этой системы получим на основе определителя:
 (2.27)
(2.27)

Рис. 2.13. Структурная схема системы управления (для М=1)
Приравнивая коэффициенты при одинаковых степенях z этих уравнений и решая систему уравнений, получим
 (2.28)
(2.28)
Аналогично, для произвольного запаздывания M (рис. 2.14) получим следующие рекуррентные формулы для вычислений коэффициентов астатического наблюдателя:
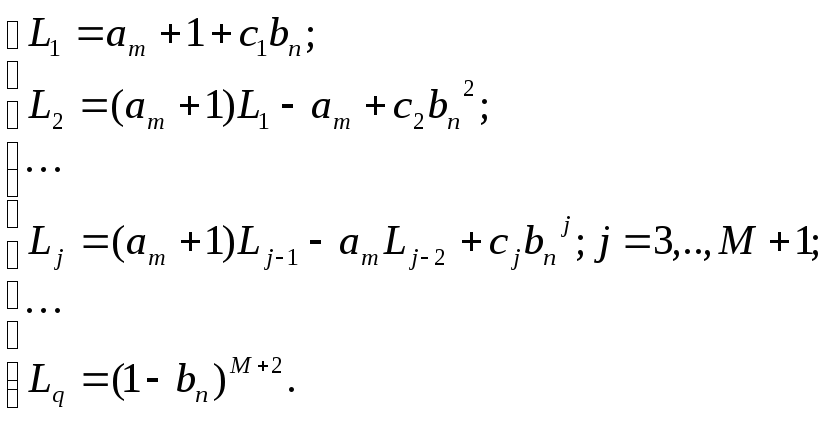 (2.29)
(2.29)
где
![]() ,
,![]() -
число сочетаний из М+2 по j, j=2..M.
-
число сочетаний из М+2 по j, j=2..M.
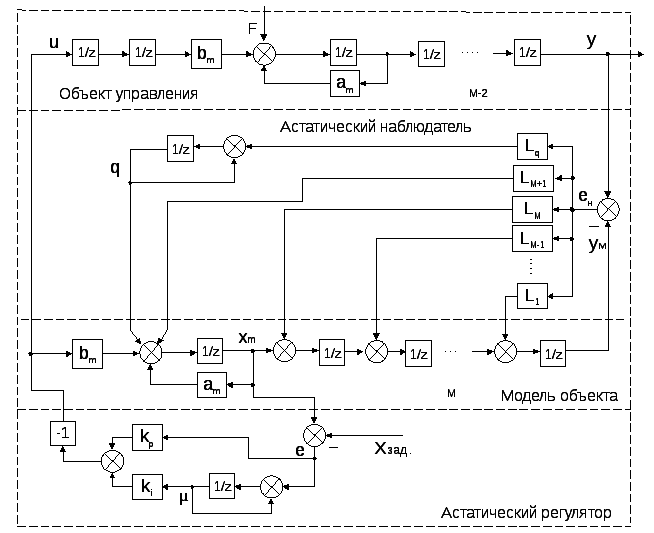
Рис. 2.14. Структурная схемасистемыуправления для произвольного запаздывания М