

Лекция №32 План лекции
1. Составление схем моделирования на основе схем моделей динамических звеньев.
2. Пример составления схем моделирования динамической системы.
5.4. Составление схем моделирования по структурным схемам динамических систем.
Для составления схемы моделирования динамической системы по структурной схеме необходимо соединить схемы моделей звеньев в соответствии с заданной структурной схемой системы.
В качестве примера составим схемы моделей динамической системы, структурная схема которой изображена на рис. 5.21. Схемы моделей изображены на рис. 5.22 и 5.23.
Если структурная схема динамической системы содержит дифференцирующие и форсирующие динамические звенья, моделирование которых потребует использования дифференцирующего усилителя, то необходимо воспользоваться некоторыми практическими рекомендациями, позволяющими исключить его использование в связи с повышенной чувствительностью к помехам.

Рис.5.22
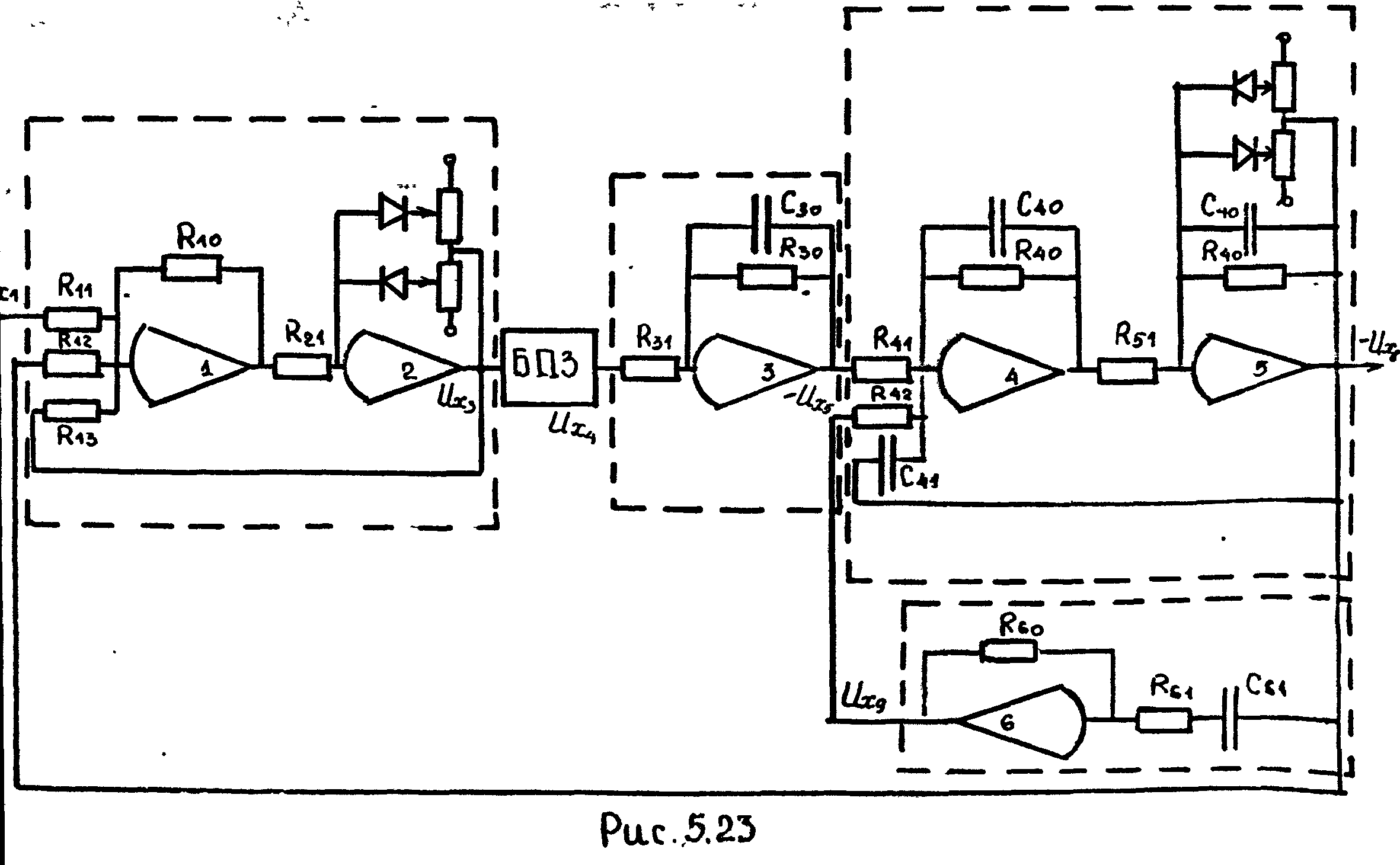
Так, при составлении схемы модели необходимо по возможности объединять дифференцирующие и форсирующие звенья с последующими инерционными звеньями. Тогда при совместном их моделировании на одном решающем усилителе перераспределением значений параметров цепи обратной связи и входной цепи РУ можно ослабить чувствительность усилителя к помехам. Следует отметить, что выполнение такой рекомендации возможно только при использовании схем моделей динамических звеньев на РУ с RC-цепями во входной цепи и цепи обратной связи.
Пусть
имеем структурную схему динамической
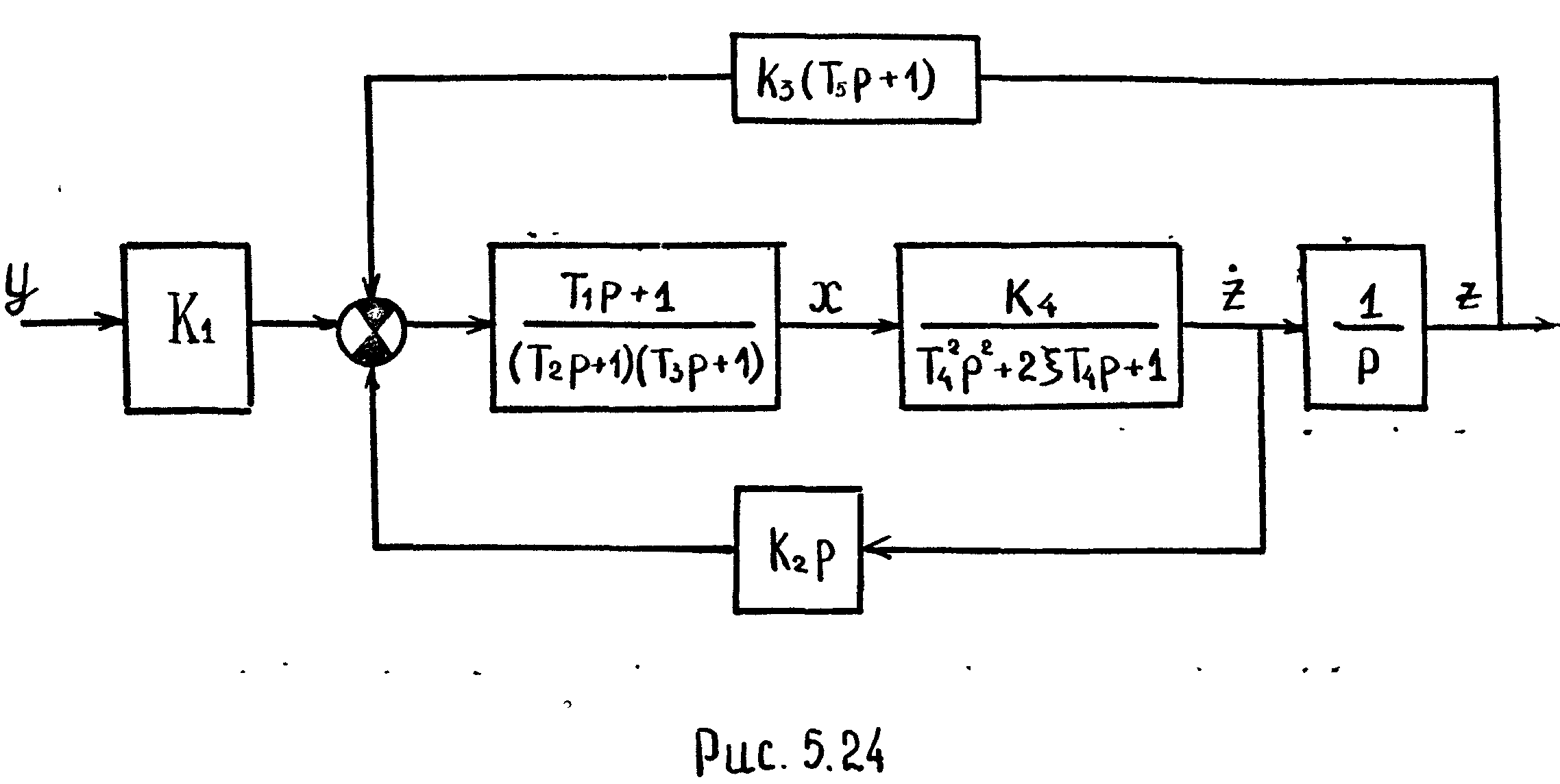
системы (см. рис. 5.24), содержащую
дифференциальное звено k2p
и форсирующее звено k3(T5p+1).
Объединим эти звенья с последующим
звеном, имеющим передаточную функцию
![]() .Для
этого по структурной схеме найдем сигнал
x
через
сигналы
.Для
этого по структурной схеме найдем сигнал
x
через
сигналы
![]() ,
,![]() ,
и
,
и![]()

В машинных переменных это уравнение примет вид:
 (5.11)
(5.11)
Составим схему модели этой части структурной схемы на одном РУ с RC-цепями, используя понятие передаточной функции РУ по i-тому входу.
Пользуясь
табл. схем
RC-цепей,
необходимо подобрать такие схемы
RС-цепей
в обратную связь и во входные цепи РУ,
чтобы общая часть трех машинных
передаточных функций
![]() была реализована за счет комплексного
сопротивления
RC-цепи
обратной связи РУ, а отличительные их
части - за счет комплексных сопротивлений
входных
RC-цепей.
Из табл. берем цепи №17а, №1, №2 и №3.
была реализована за счет комплексного
сопротивления
RC-цепи
обратной связи РУ, а отличительные их
части - за счет комплексных сопротивлений
входных
RC-цепей.
Из табл. берем цепи №17а, №1, №2 и №3.
Для них:
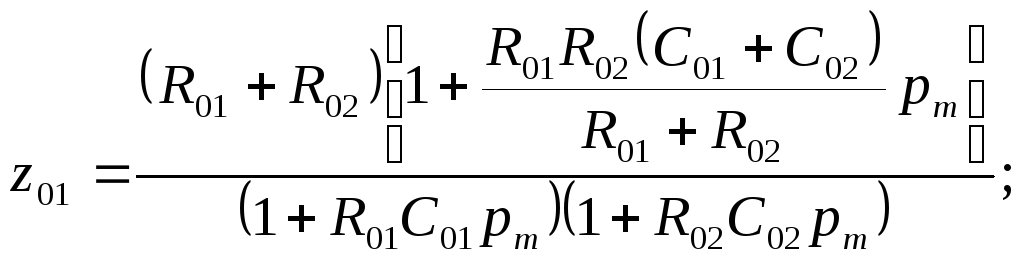
![]()
![]()
![]()
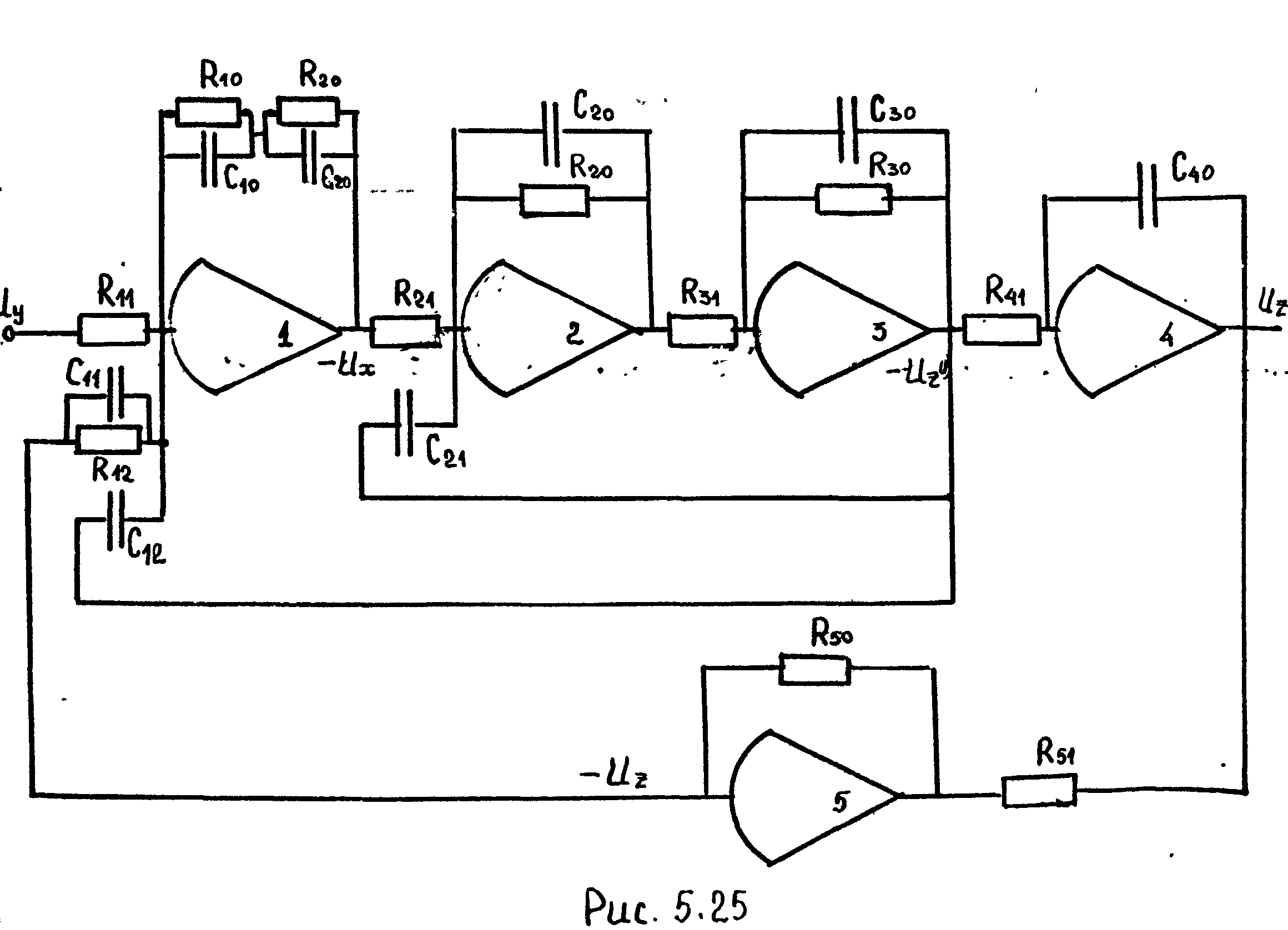
Схема модели динамической системы имеет вид (см. рис. 5.25), для которой запишем сигнал Ux через Uy, Uz, и Uz(1).
 Сопоставляя
(5.12) с (5.11), находим соотношения для
расчета
RC-параметров
схемы модели:
Сопоставляя
(5.12) с (5.11), находим соотношения для
расчета
RC-параметров
схемы модели:
![]()
![]()
![]()
![]()
![]()
![]()
Чтобы
получить работоспособною схему модели,
при расчете RC-параметров
необходимо выполнить условие:
![]() и
и![]() .
.