

Лекция № I вводная План
1. Сущность моделирования.
2. Физические и математические модели.
3. Машинное моделирование.
4. АВМ, достоинства, недостатки.
5. АЦВМ - эффективное средство моделирования.
Моделирование как метод получения информации о поведении динамических систем занимает промежуточное место между аналитическими исследованиями и натурным экспериментом.
Моделирование систем управления (СУ) летательными аппаратами в настоящее время является обязательным этапом проектирования, разработки и испытаний. Это обусловлено следующим. Во-первых, в силу исключительной сложности СУ их аналитический расчет возможен только в очень ограниченных пределах, и моделирование является единственным средством анализа и синтеза. Во-вторых, оно позволяет проводить и оценить результаты, получаемые в реальных условиях, путем многократной проверки на модели с включением реальной аппаратуры.
Моделирование заключается в замене исходных систем или явлений (оригиналов) другими системами или явлениями, называемыми моделями, которые в той или иной мере воспроизводят свойства оригинала.
Из возможных видов моделей выделим физические и математические модели, которые воспроизводят процессы, протекающие в оригинале, и предназначены для исследования этих процессов с меньшими затратами средств и времени.
Физические модели имеют одинаковую с оригиналом физическую природу и отличаются от него размерами и мощностью. Построение физических моделей основано на правилах теории подобия. Физическая модель воспроизводит все стороны процесса, протекающего в оригинале, в том числе и такие его стороны, которые не поддаются математическому описанию, но физическая модель мало универсальна.
Примеры физических моделей: модели ракет в аэродинамических трубах, модели судов в "опытовых" бассейнах и др.
Математические модели имеют отличную от оригинала физическую природу и эквиваленты ему по математическому описанию. Построение математических моделей основано на идентичности уравнений описывающих процессы различной физической природы. В.И. Ленин в работе "Материализм и эмпириокритицизм" писал: "Единство природы обнаруживается в "поразительной аналогичности" дифференциальных уравнений, относящихся к разным областям явлений".
Самые разнообразные явления описываются одними и теми же уравнениями, и в этом проявляется универсальность математических моделей. Математическая модель воспроизводит только те стороны процесса, которые были отражены в уравнениях, описывающих процесс, но она обладает универсальностью.
Одним из способов математического моделирования является машинное моделирование, когда модель строится из отдельных решающих элементов, выполняющих определенные математические операции. Соединение решающих элементов осуществляется в соответствии с уравнениями, описывающими процесс в оригинале.
Рассмотрим пример. Движение механической системы, приведенной на рис. I., описывается уравнением (1).
![]() (1)
(1)
Структурная схема математической машинной модели, составленная в соответствии с уравнением (I), предварительно представленном в виде
![]() ,
(1a)
,
(1a)
приведена на рис. 2.
На схеме знаком
интеграла обозначены интегрирующие
элементы, знаком суммы - суммирующий
элемент, знаком Кi
– элементы, выполняющие умножение на
постоянный коэффициент. На вход первого
интегрирующего элемента поступает
величина
![]() .
Полученные на выходах интегрирующих
элементов величины
.
Полученные на выходах интегрирующих
элементов величины![]() и x и изменяющаяся по заданному закону
величина f(t)в соответствии с уравнением
(1а) умножаются на постоянные коэффициенты
и складываются суммирующим элементом.
На выходе суммирующего элемента
получается величина
и x и изменяющаяся по заданному закону
величина f(t)в соответствии с уравнением
(1а) умножаются на постоянные коэффициенты
и складываются суммирующим элементом.
На выходе суммирующего элемента
получается величина![]() ,
которая и подается на вход первого
интегрирующего элемента, замыкая тем
самым схему модели.
,
которая и подается на вход первого
интегрирующего элемента, замыкая тем
самым схему модели.
Мощным средством построения математических моделей являются вычислительные машины. Используя вычислительные машины для решения дифференциальных уравнений, описывающих изучаемый процесс, можно с помощью универсального инструмента воспроизводить процессы, аналогичные различным физическим явлениям, легко осуществлять разнообразные вычислительные (модельные) эксперименты. Именно эта универсальность и удобство выполнение разнообразных вариаций и обусловили широкое распространение
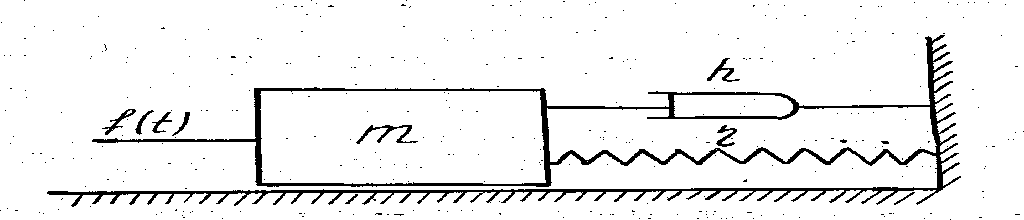
Рис. 1
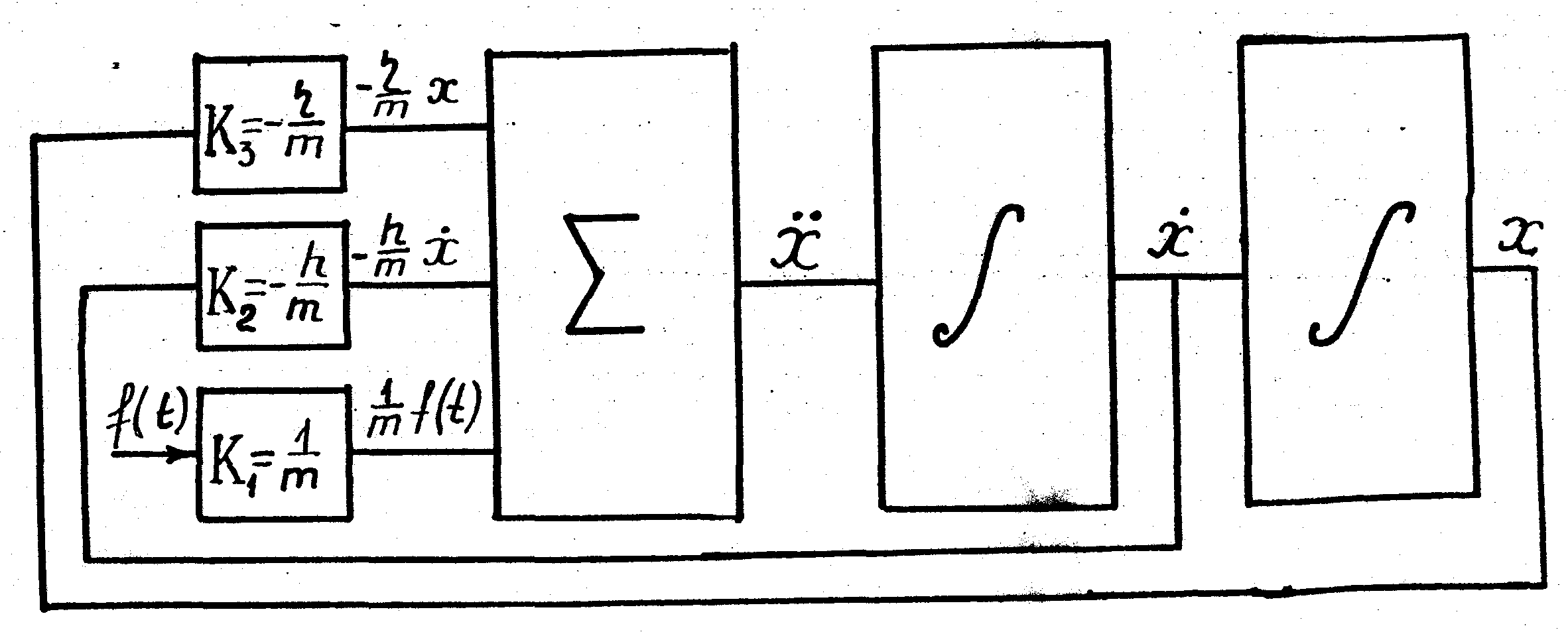
Рис. 2
метода математического моделирования. При машинном моделировании исходным переменным ставятся в соответствие машинные переменные. Ими могут быть электрические напряжения, как это имеет место в аналоговых вычислительных машинах и системах (АВМ и АВС), или кодовые комбинации, как это имеет место в цифровых вычислительных машинах (ЦВМ).
В зависимости от используемых вычислительных машин различают моделирование на АВМ, ЦВМ и аналого-цифровое, когда в системе моделирования одновременно используются АВМ и ЦВМ, образуя АЦВМ и АЦВС. При машинном моделировании с вычислительной системой может сопрягаться реальная аппаратура. Это - полунатурное моделирование, позволяющее воспроизводить процессы, которые частично не имеют математического описания.
Для исследования САУ аналоговое моделирование во многих случаях является более предпочтительным, чем цифровое. Как правило, работа САУ описывается дифференциальными уравнениями, для решения которых и предназначены АВМ. Кроме того, свойство "грубости" САУ позволяет получать удовлетворительные оценки качества управления при ограниченной точности элементов АВМ.
В настоящее время, несмотря на значительные успехи в области моделирования САУ на ЦВМ, аналоговое моделирование продолжает оставаться мощным средством изучения САУ.
Серийное изготовление АВМ в нашей стране началось с 1946 г. С тех пор было разработано и изготовлено большое число ламповых АВМ (ИПТ-5, МПТ-9, ЛМУ-1, ЭМУ-10, МН-7, MH-I4, MH-I7 и др.). Вместе с первым поколением ламповых АВМ в конце 50-х годов, когда развилась полупроводниковая техника, стали выпускать АВМ на полупроводниках - АВМ второго поколения (MH-10M, МH-I8, АВК-2 и др.).
С появлением полупроводниковых интегральных схем, в нашей стране стали выпускать АВМ третьего поколения: аналоговые вычислительные комплексы ABK-3I, АВК-32, АВК-33, ЭМУ-200.
Особенно значение аналоговых средств моделирования возрастает при аналого-цифровых методах исследования САУ. За последние 25-30 лет средства аналоговой техники прошли огромный путь, охватывающий следующие основные этапы их развития: аналоговые машины, работающие в режиме одноразового решения; аналоговые машины с периодизацией решения; итеративные аналоговые машины; аналоговые машины, дополненные средствами запоминания и хранения информации, сложными системами программного управления и устройствами для образования и измерения статистических характеристик; наконец, аналого-цифровые вычислительные системы (АЦВС). В АЦВМ и АЦВС два вида моделирования (аналоговое и цифровое) взаимно дополняют друг друга. Первые попытки объединить АВМ и ЦВМ с целью решения таких задач, которые сложно было реализовать на отдельно взятых машинах, были сделаны в конце 50-х годов. В последние годы достигнуты значительные успехи в области построения АЦВС. Ученые СССР, США и других стран разработали новое поколение АЦВС, которые являются весьма эффективным средством моделирования. Это, например: ГВС-100 (СССР, СФРЮ), АЦВС "Русалка"; АЦВК-3, АЦВК-ЗЕС, АЦВК-31, АЦВК-32, АЦВК-33 (СССР), система HRS -860 (ФРГ), семейство систем PACER и EAJ -2000 (США) и др.
Достоинствами АВМ являются простота подготовки задачи к решению, быстрота решения задачи, простота изменения параметров и начальных условий, высокая наглядность решения. Длительность решения задачи на АВМ зависит от выбранного масштаба времени и не зависит от сложности задачи, так как все математические операции выполняются одновременно. В зависимости от выбранного масштаба времени скорость процесса, протекающего в модели, может быть равна, больше или меньше скорости процесса, протекающего в оригинале. Масштаб времени выбирается с таким расчетом, чтобы длительность решения задачи не превышала определенной для каждой АВМ величины. Для большинства АВМ эта величина лежит в пределах 150 2000 сек.
Недостатком АВМ является невысокая точность решения задачи. Точность решения задачи на АВМ определяется точностью выполнения математических операций решающими элементами, входящими в её состав. Погрешность результатов может составлять несколько процентов от максимальных значений величин. Даже для наиболее точных АВМ погрешность результатов - не менее 0,1%.
В настоящее время определились два направления совершенствования аналоговой вычислительной техники. Первое - улучшение структуры и архитектуры АВМ; использование более совершенных элементов и блоков; второе - создание АВМ на базе специальных микропроцессоров (больших интегральных схем) для обработки аналоговых сигналов. В связи с этим ожидается увеличение точности решения задач почти на порядок по сравнению с АВМ третьего поколения.