

2.3.2 Электромагнитные коммутацнонные элементы
Деление на релеиконтакторыусловное.
Реле, если
 .
.Контактор, если
 ,
и при
,
и при - контакты выполнены из серебра или
металлокерамики.
- контакты выполнены из серебра или
металлокерамики.
А) Контакторы
Рисунок 1.47 – Контактор.
Примеры контакторов:
СОК-12 – серебряный, окиси Кадмия 12%;
СОМ-8 – серебряный, окиси Меди 8%;
Б) Реле
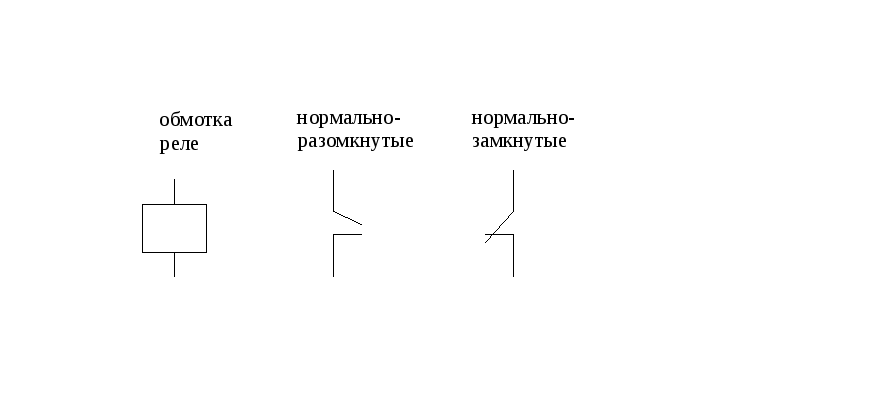
Рисунок 1.48 – Виды реле.
По назначению реле делятся на:
коммутационные;
выпрямительные;
напряжения
времени.
По элементной базе реле делятся на:
электромагнитные;
полупроводниковые;
тепловые.
Примеры реле:
ТКЕ52ПД – Т – напряжение питания
 (С –
(С – );
К – коммутационное; Е – единицы
ампер тока, протекающего через контактор
5А; 2П – две пары переключающих контактов;
Д – длительного режима работы.
);
К – коммутационное; Е – единицы
ампер тока, протекающего через контактор
5А; 2П – две пары переключающих контактов;
Д – длительного режима работы.ТКЕ521 – Т – напряжение питания
 (С –
(С – );
К – коммутационное; Е – единицы
ампер тока, протекающего через контактор
5А; 2 – количество нормально замкнутых
контактов; 1 – количество нормально
разомкнутых контактов.
);
К – коммутационное; Е – единицы
ампер тока, протекающего через контактор
5А; 2 – количество нормально замкнутых
контактов; 1 – количество нормально
разомкнутых контактов.
Время срабатываниядля обычных
контактов![]() ,
для герметичных -
,
для герметичных -![]() .
.
В) Поляризованное реле
Поляризованное реле– это реле, реагирующее на полярность протекающего тока через обмотку.
Принцип действия
Поляризованное реле определяет направление движения тока, и если ток совпадает с направлением постоянных магнитов, происходит срабатывание.
Время срабатывания![]() .
.
3 Потребители электрической энергии
3.1 Авиационный электропривод
Авиационный электропривод– это устройство, предназначенное для преобразования электроэнергии в механическую поступательную или вращательную энергию движения, и состоящее изэлектродвигателя или электромагнита,системы передачи движения и аппаратуры управления.
3.1.1 Управление электроприводом
Управление электроприводом включает в себя:
пуск (вход или включение);
торможение (остановка);
реверсирование (изменение направления вращения);
регулирование скорости вращения.
а) Пуск (вход или включение)
Пуск бывает:
прямой (применяется для маломощных двигателей с
 );
);
реостатный;
изменением напряжения питания.
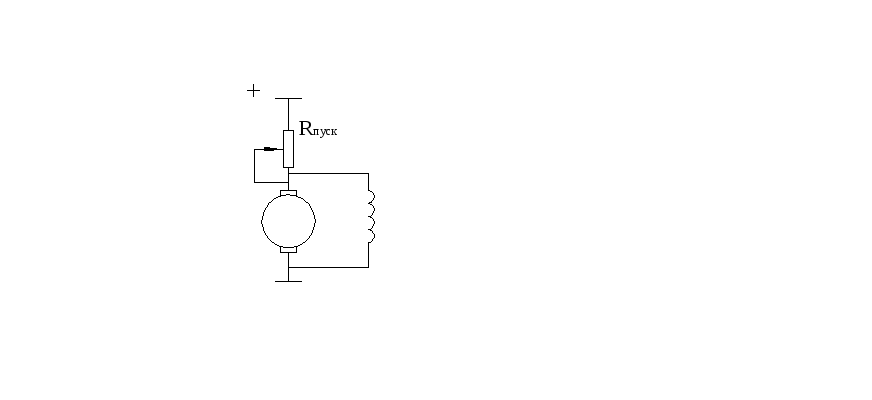

Рисунок 1.49 – Схема
электропривода Рисунок
1.50 – График зависимости ![]() .
.
с реостатным пуском.
б) Торможение (остановка)
Торможение бывает:
механическое (с помощью электромагнитных муфт);
противовключением;
электродинамическое (рекуперативное – с возвращением электроэнергии).
Суть электродинамического торможениязаключается в том, что когда якорная обмотка ЯО отключается от напряжения питания и замыкается накоротко, либо на какое-то сопротивление, то напряжение питания на обмотке возбуждения остается. При этом двигатель начинает работать в режиме генератора с изменением направления тока в ЯО. В результате чего происходит быстрое (резкое), но плавное торможение.

Рисунок 1.51 – Схема электродинамического торможения.
В) Реверсирование (изменение направления вращения)
Реверсирование производится изменением:
направления движения тока в ЯО или в ОВ (для электродвигателей постоянного тока);
порядка чередования фаз (для электродвигателей переменного тока);
скорости вращения.