

4.1 Станции наблюдения земной поверхности (панорамные)
![]() ,
где
,
где
![]() - эффективная площадь отражения;
- эффективная площадь отражения;
![]() - напряжение диаграммы направленности.
- напряжение диаграммы направленности.
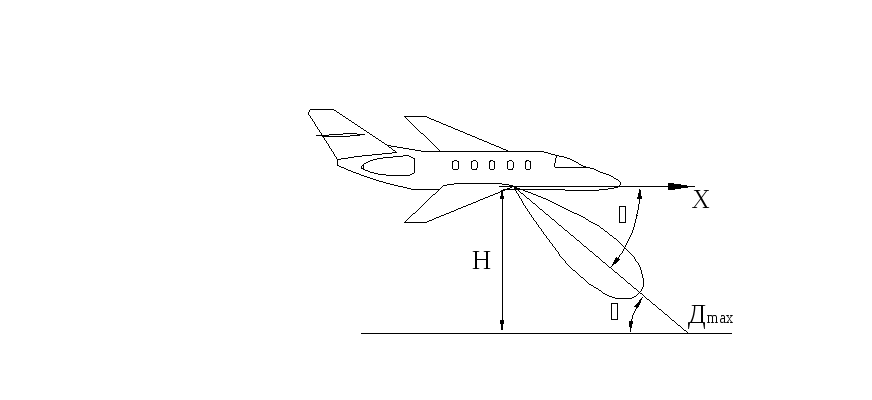
Рисунок 3.52 – Схема действия станции наблюдения земной поверхности.
Необходимо, чтобы
![]() ,
а не
,
а не![]() .
И для обеспечения условия
.
И для обеспечения условия![]() ,
надо, чтобы
,
надо, чтобы![]()
![]()
![]() .
.
Дальностьравна
![]() .
.
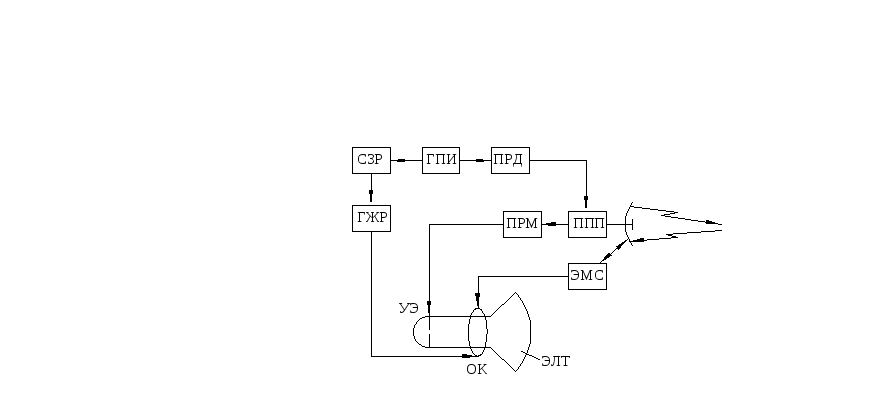
Рисунок 3.53 – Устройство станции наблюдения земной поверхности:
СЗР – система задержки развертки; ГПИ – генератор периодических импульсов (хронизатор);
ПРД – передатчик; ГЖР – генератор ждущей развертки; ПРМ – приемник;
ППП – переключатель приема передач; ЭМС – электромеханическая система сканирования;
УЭ – управляющий электрод; ЭЛТ - электронно-лучевая трубка.
Принцип действия
Под воздействием хронизатора передатчик вырабатывает импульсно-модулирующий сигнал, который через переключатель приема передач поступает на приемо-передающую антенну. Принятые антенной отраженные от земной поверхности сигналы, поступают в приемник, где усиливаются и детектируются. Выделенные импульсы поступают на управляющий электрод электронно-лучевой трубки. Также от хронизатора запускается развертка ЭЛТ. За время, соответствующее максимальной дальности, луч проходит расстояние от центра трубки до периферии. При этом, яркость свечения вдоль луча (линии развертки) зависит от напряжения, поступающего на управляющий электрод, а, следовательно, и от характера местности.
4.2 Рлс наведения ла
РЛС наведения ЛА– это совокупность автоматического дальномера с системой автоматического определения угловых координат относительно его продольной оси (вертикальной или горизонтальной), необходимая для обнаружения ЛА противника и определения его координат.
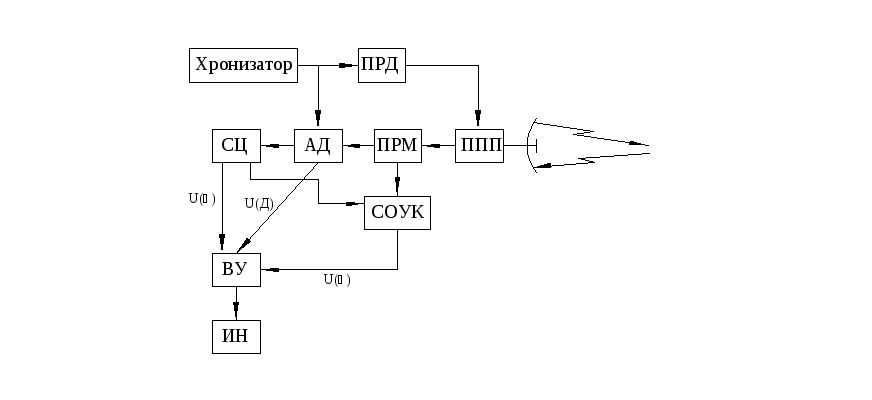
Рисунок 3.54 – Устройство РЛС наведения ЛА:
ПРД – передатчик; СЦ – селектор цели; ПРМ – приемник;
ППП – переключатель приема передач; СОУК – система определения угловых координат;
ВУ – вычислительное устройство; ИН – индикатор.
5 Системы посадки
Посадка – это самый ответственный элемент движения самолета.
ВПП строят таким образом, чтобы взлет и посадка осуществлялись против ветра.
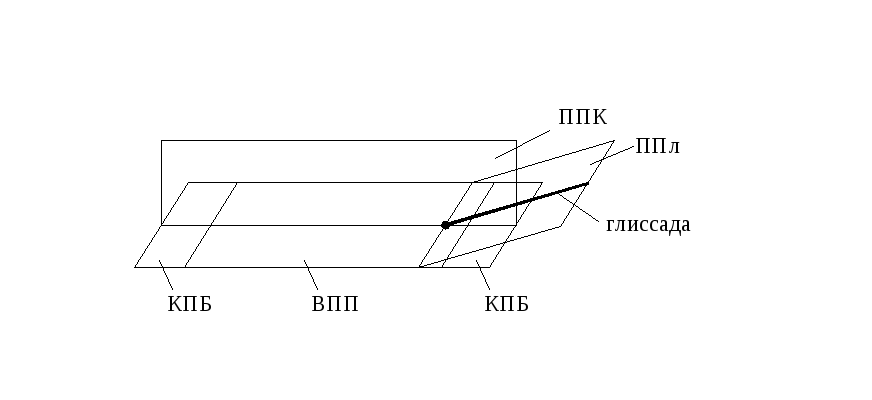
Рисунок 3.55 – Схема взлетно-посадочной полосы:
КПБ – концевая полоса безопасности; ППК – плоскость посадочного курса;
ППл – плоскость планирования; ППК – плоскость посадочного курса.
По требованиям международной организации гражданской авиации ICAO (ИКАО) существует 3 категории посадки:
видимость ВПП
 ,
высота
,
высота - автопилот;
- автопилот;видимость ВПП
 ,
высота
,
высота - автопилот;
- автопилот;высота
 - полностью автоматическая посадка:
- полностью автоматическая посадка:
а) видимость ВПП
![]() ;
;
б) видимость ВПП
![]() ;
;
а) видимость ВПП
![]() .
.
Системы посадки бывают:
упрощенные;
радиомаячные:
а) метрового диапазона;
б) сантиметрового (радиолокационного).
лазерные(рабочий диапазон
 ).
).
5.1 Упрощенная система посадки
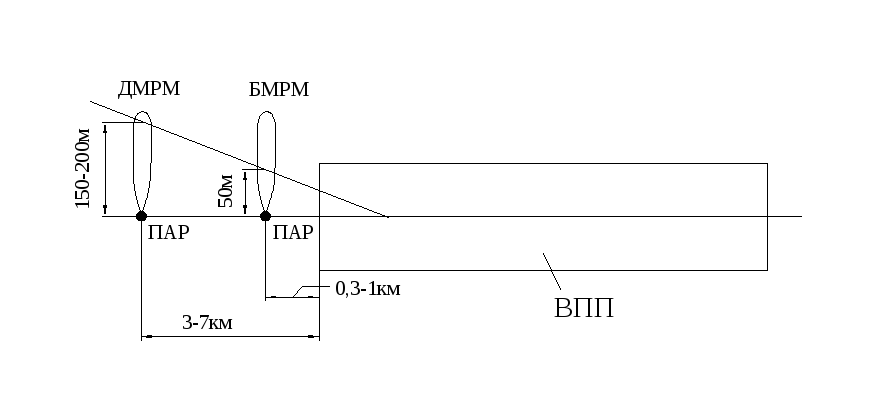
Рисунок 3.56 – Схема упрощенной система посадки:
ПАР – приводная аэродромная радиостанция; ДМРМ – дальний маркерный радиомаяк;
БМРМ – ближний маркерный радиомаяк.
Курсовой угол радиостанции![]() .
.
К наземному радиооборудованиюотносятся: ПАР, МРМ;к бортовому– АРК, МРП, РВ.
МРП – маркерный радиоприемник;
РВ – радиовысотомер (система, работающая только в светлое время суток).