

1.1.1 Основные параметры аб
ЭДС
 и размерное напряжение
и размерное напряжение
 .
.
![]()
![]() - если внешняя нагрузка отсутствует.
- если внешняя нагрузка отсутствует.
![]() ,
где
,
где
![]() – внутреннее сопротивление АБ, меняющееся
в зависимости от температуры
– внутреннее сопротивление АБ, меняющееся
в зависимости от температуры![]() и плотности
и плотности![]() ,
и являющееся показателем химической
активности электролита
,
и являющееся показателем химической
активности электролита![]() ;
;
![]() – сопротивление электролита;
– сопротивление электролита;
![]() – сопротивление электродов;
– сопротивление электродов;
![]() – переходное сопротивление.
– переходное сопротивление.
Например:![]() имеет
имеет![]() .
.
Емкость ХИТ– это количество вещества
 ,
которое способен отдать аккумулятор
при разряде номинальным током до
предельно-допустимого напряжения.
,
которое способен отдать аккумулятор
при разряде номинальным током до
предельно-допустимого напряжения.
 .
.
Если
![]() ,
то
,
то![]() - если разряжающий ток постоянный, где
- если разряжающий ток постоянный, где![]() - время разряда.
- время разряда.
Срок службы, определяющийся числом зарядно-разрядных циклов.
Время саморазряда.
Примеры АБ:
 :
:
Стартерно-авиационная моноблочная; 12
– количество последовательно соединенных
элементов; 28 – номинальная емкость
![]() .
.
Серебряно-цинковая, среднего режима
разряда; 15 – количество последовательно
соединенных элементов; 45 – номинальная
емкость
![]() .
.
Никель-кадмиевая батарея, намазная; 20
– количество последовательно соединенных
элементов; 25 – номинальная емкость
![]() .
.
1.1.2 Правила установки аб на борт ла
На борт ЛА устанавливаются АБ, имеющие
 .
.При установке необходимо исключить возможность подсоединения с неправильной полярностью.
Необходимо исключить возможность одновременной работы бортовой батареи и наземного источника энергии.
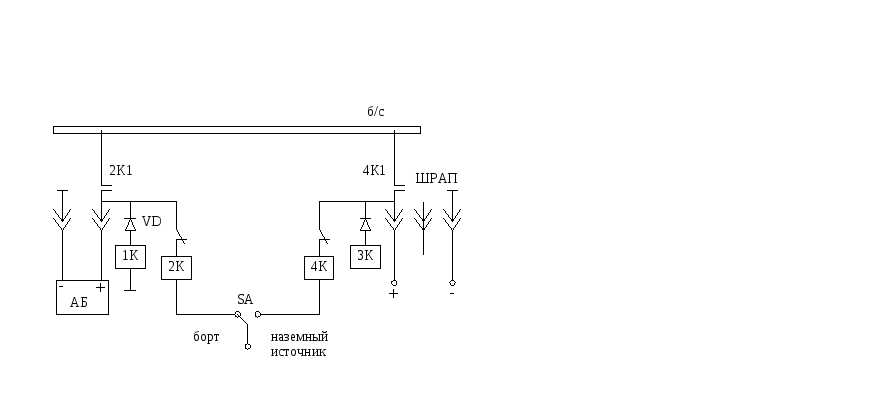
Рисунок 1.6 – Схема установки АБ на борт ЛА:
ШРАП – штепсельный разъем аэродромного питания.
1.2 Электромашинные генераторы
Принцип действия
Основан на законе электромагнитной
индукции, согласно которому в обмотке
с числом витков![]() ,
пронизываемой магнитным потоком
,
пронизываемой магнитным потоком![]() ,
изменяющимся со скоростью
,
изменяющимся со скоростью![]() ,
наводится ЭДС, равная произведению
числа витков на скорость изменения
магнитного потока
,
наводится ЭДС, равная произведению
числа витков на скорость изменения
магнитного потока![]() .
.
![]() ,
где
,
где
![]() - электромагнитная постоянная,
- электромагнитная постоянная,![]() ;
;
![]() - круговая частота,
- круговая частота,![]() .
.
Для постоянного тока
![]() .
.
1.2.1 Генераторы постоянного тока
Любая электрическая машина по принципу действия состоит из 2х основных частей:
якоря (якорной обмотки)– той части машины, где наводится ЭДС;
индуктора– той части машины, которая наводит магнитный поток.
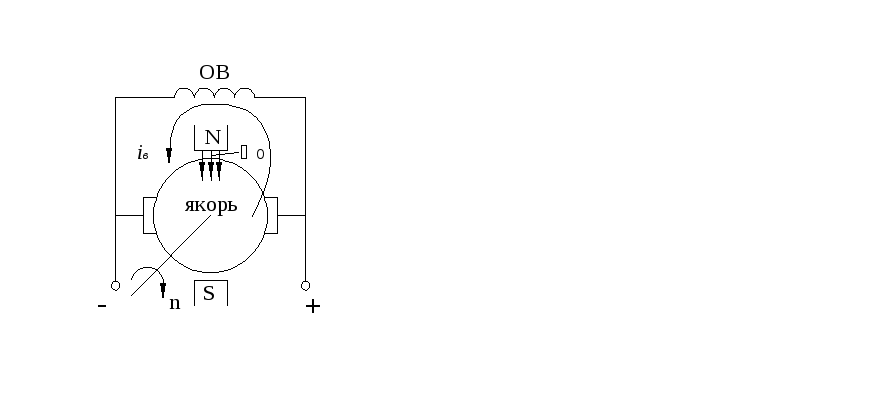
Рисунок 1.7 – Принципиальная схема генератора постоянного тока
![]() ,
,
![]() .
.
Процесс самовозбуждения протекает следующим образом
Под действием потока остаточного магнетизма в якорной обмотке наводится ЭДС самовозбуждения, под действием которого по замкнутой цепи, состоящей из якорной обмотки и обмотки возбуждения (ОВ), начинает протекать ток возбуждения, который создает дополнительную намагничивающую силу.
И в случае согласованного направления тока в ОВ с потоком остаточного магнетизма происходит увеличение магнитного потока, а, следовательно, и увеличение наводимой ЭДС. И так до тех пор, пока наводимая ЭДС не уравновесится падением напряжения в цепи ОВ.
А) Условия самовозбуждения генераторов постоянного тока
Наличие потока остаточного магнетизма.
Согласование включения ОВ с потоком остаточного магнетизма.
Минимальное сопротивление ОВ.
Внешняя нагрузка должна быть отключена.
Б) Характеристики генераторов постоянного тока
Характеристика холостого хода
 .
.
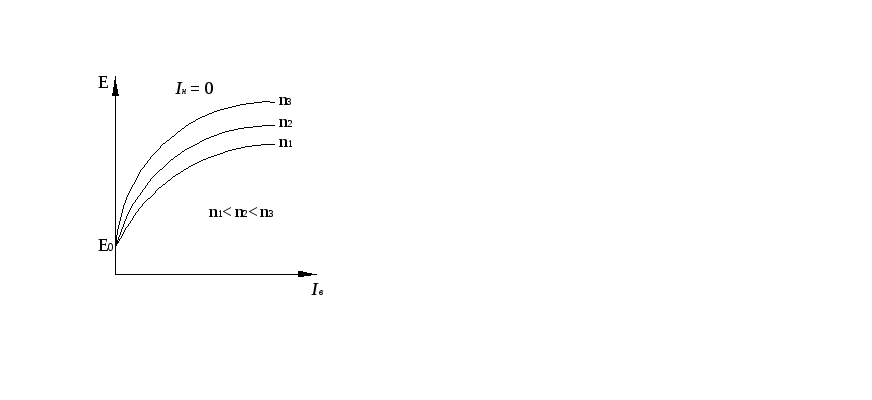
Рисунок 1.8 – График
зависимости ![]() .
.
Внешняя характеристика системы возбуждения
 .
.

Рисунок 1.9 – График
зависимости ![]() .
.
Нагрузочная характеристика
 .
.
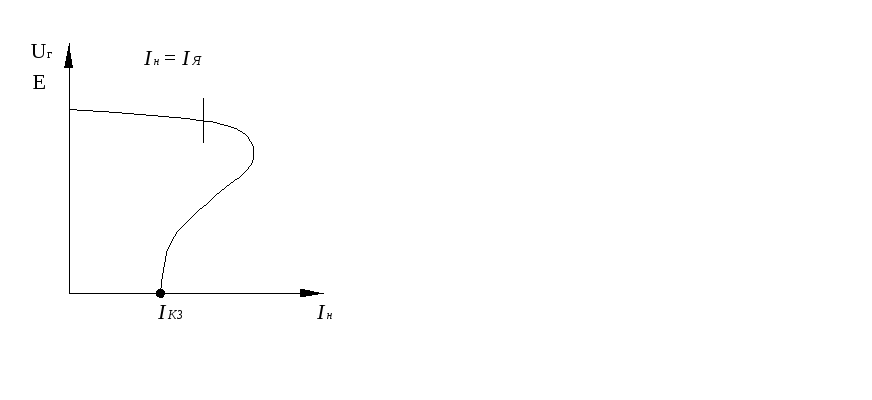
Рисунок 1.10 – График
зависимости ![]() .
.
![]() .
.
Регулировочная характеристика
 .
.
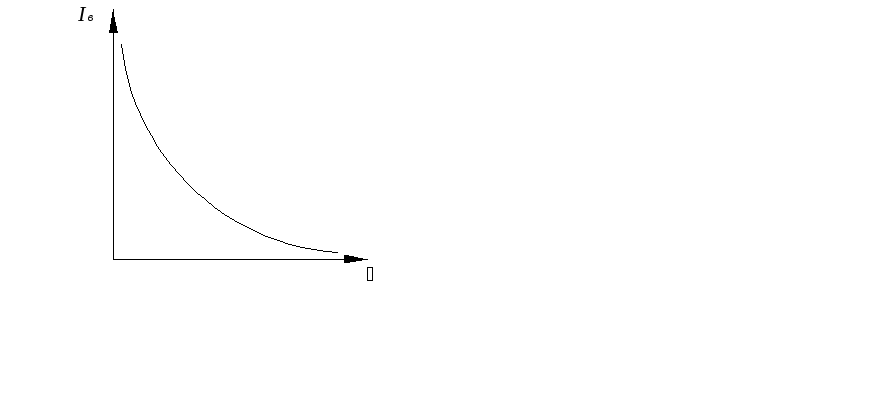
Рисунок 1.11 – График
зависимости ![]() .
.
![]() .
.
Поддержание напряжения генератора в заданном диапазоне осуществляется с помощью регуляторов напряжения, которые изменяют ток в ОВ и, соответственно, магнитный поток, ЭДС и напряжение.
Типы регуляторов:
вибрационный;
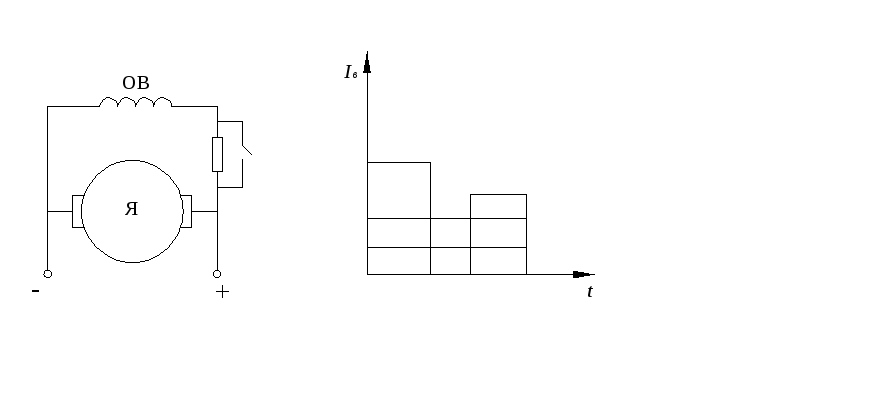

Рисунок 1.12 –
Принципиальная схема
Рисунок 1.13 – График зависимости ![]() .
.
вибрационного регулятора
реостатный (угольный);
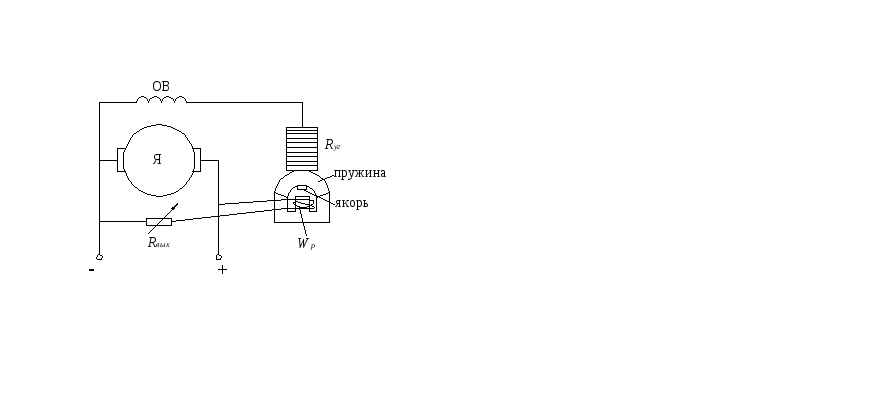
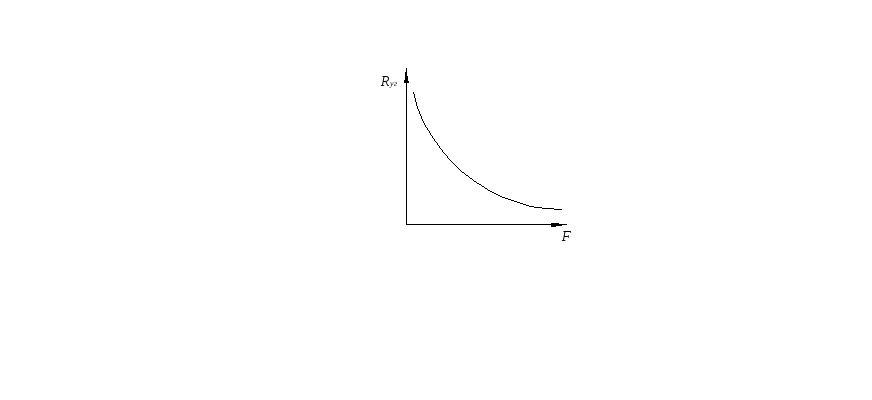
Рисунок 1.14 –
Принципиальная схема Рисунок
1.15 – График зависимости ![]() .
.
реостатного (угольного) регулятора.
полупроводниковый;
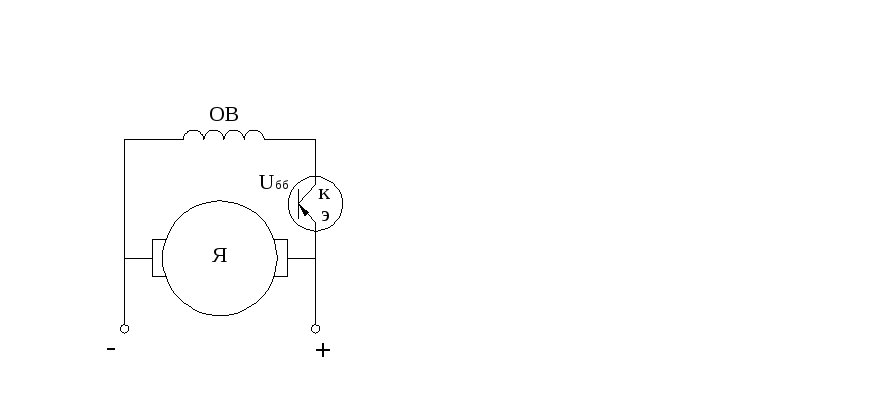
Рисунок 1.16 – Принципиальная схема полупроводникового регулятора
на магнитных усилителях.