

А) Системы, основанные на счислении пройденного пути


Рисунок 2.70 –
![]() ,
где
,
где
![]() - путевая скорость.
- путевая скорость.
![]() .
.
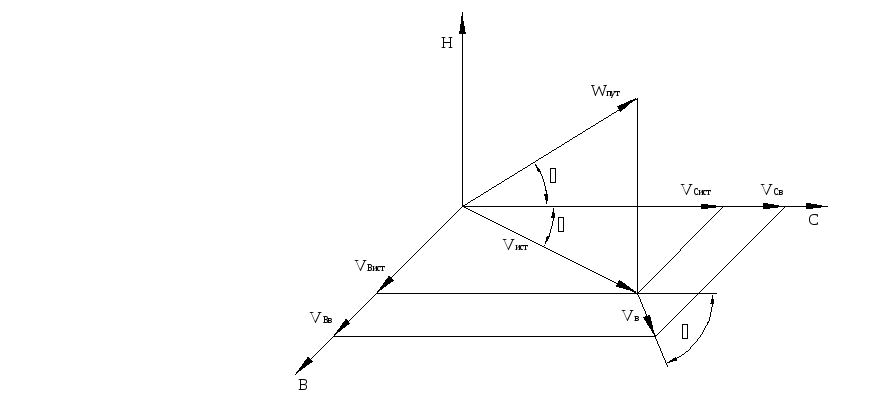
Рисунок 2.71 –
Если
![]() ,
,![]() ,
то
,
то
![]() ,
,
![]() .
.
Тогда
![]() ,
,![]() .
.
б) Инерциальные системы навигации
Принцип действия сводится к двойному
интегрированию действующих ускорений![]() .
.
![]() .
.
![]() ,
,![]()
![]() .
.
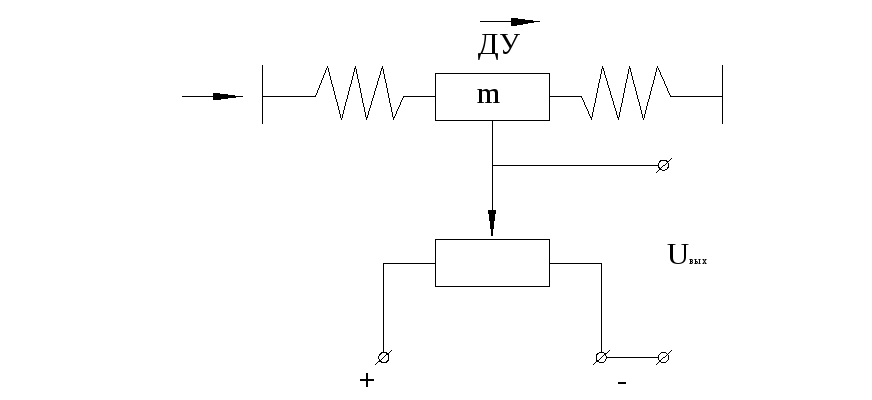
Рисунок 2.72 – Схема датчика ускорения.
![]() ,
,![]()
![]()
![]() .
.
![]() .
.

Рисунок 2.73 – Схема гиростабилизированной платформы (ГСП):
1,2 – ДУП – датчик углового положения; ЭД – электродвигатель.
4.8 Приборы для измерения углов атаки и скольжения
Угол атаки![]() – это угол между продольной осью самолета
и вектором набегающего потока в
вертикальной плоскости.
– это угол между продольной осью самолета
и вектором набегающего потока в
вертикальной плоскости.

Рисунок 2.74 – Угол атаки.
Угол скольжения![]() – это угол между продольной осью самолета
и вектором скорости набегающего потока
в горизонтальной плоскости.
– это угол между продольной осью самолета
и вектором скорости набегающего потока
в горизонтальной плоскости.
Скольжение– это боковая сила.
4.8.1 Флюгерный метод
Это наиболее распространенный метод для измерения угла атаки,при котором происходит установка специальных профилей по направлению набегающего потока.
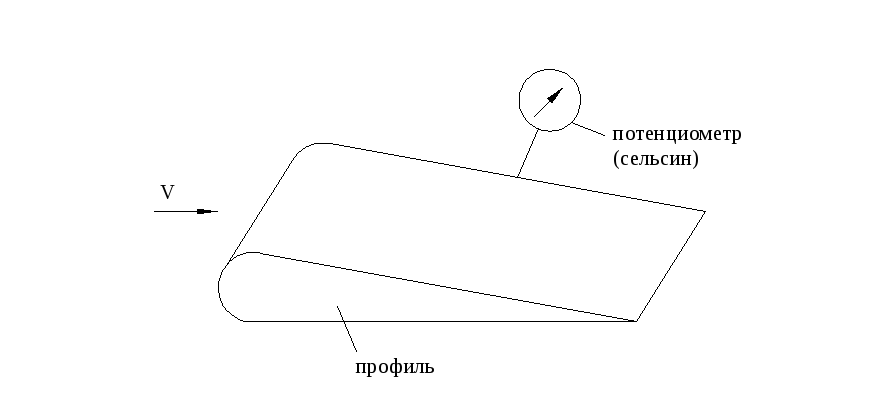
Рисунок 2.75 – Флюгерный метод.
4.8.2 Установка ПВД под углом

Рисунок 2.76 – Установка ПВД под углом.
4.8.3 Доплеровский измеритель путевой скорости и угла скоса.
Качественное определение угла скольжения,т.е. показывает его наличие.
5 Приборы контроля работы отдельных агрегатов и систем
5.1 Расположение приборов на приборной доске
5.1.1 «Т»-образная схема по требованиям ИКАО

Рисунок 2.77 – «Т»-образная схема:
V – указатель скорости; АГ – основной авиагоризонт; Н – указатель высоты; М – указатель числа М;
АК – авиационный компас; АГ – дублирующий авиагоризонт;
ПНН – пилотажно-навигационный прибор.
5.1.2 Калиматорная схема
Информация выводится на лобовое стекло самолета или шлем пилота.
5.2 Системы автоматической регистрации параметров полета (САРПП)
«Черные ящики»– это устройства, регистрирующие наиболее важные параметры полета, необходимые для:
объективной оценки техники пилотирования;
расследования причин летных происшествий;
проведения летных испытаний.
По принципу действия САРПП делятся на системы с записью на:
кинофотопленку путем царапания корундовым стержнем по пленке;
кинофотопленку световым лучом;
магнитные носители.
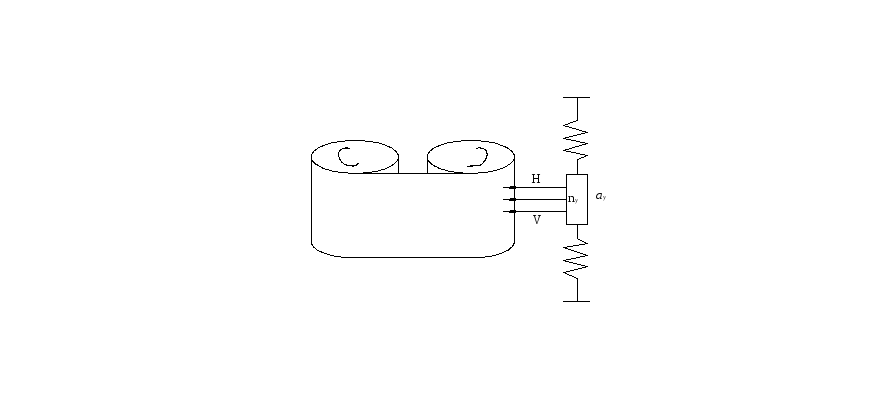

Рисунок 2.78 – Механический самописец К3-63. Рисунок 2.79 – Тарировочный график.
Механический самописецрегистрирует
параметры:![]() ,
,![]() ,
,![]() (вертикальная перегрузка), а затем
строится тарировочный график, показывающий
зависимость перемещений от показателя,
который используется для расшифровки.
(вертикальная перегрузка), а затем
строится тарировочный график, показывающий
зависимость перемещений от показателя,
который используется для расшифровки.
5.3 Система автоматического управления (сау)
5.3.1 Задачи, решаемые сау
Передача управляющих сигналов от летчика или автоматических устройств к органам управления.
Обеспечение необходимой мощности для отклонения органов управления.
Обеспечение заданной статистической и динамической устойчивости.
Формирование необходимых управляющих сигналов для автоматического траекторного управления.
Формирование необходимых характеристик управляемости.
Формирование сигналов на директорные (командные) приборы при режиме полуавтоматического управления.
Обеспечение безопасности пилотирования путем соответствующей сигнализации и ограничения отклонения органов управления при подходе к опасным (предельным) значениям параметров полета.

Рисунок 2.80 – Устройство система автоматического управления:
ОПР – ограничитель предельных режимов полета; МТРУ – механизм тряски ручки управления;
ЗМ – загрузочный механизм; МТЭ – механизм триммерного эффекта;
МОСПРУ – механизм ограничения скорости перемещения ручки управления;
МАРЗ – механизм автомата регулировки загрузки; ООР – ограничитель опасных режимов;
МСОР – механизм стопорения опасных режимов;
МРПО – механизм регулировки передаточного отношения; РМ – рулевая машинка; ГУ – гидроусилитель.

Рисунок 2.81 – Устройство современной системы автоматического управления:
АБСУ – автоматизированный привод системы управления; ГП – гидропривод; РУ – ручка управления.