

1.3.3 Инверторы
Инверторы– это преобразователи постоянного тока в переменный ток.
Инверторы делятся на:
электромашинные;
статические.
А) электромашинные инверторы
Примеры электромашинных инверторов:
ПО-750
 – преобразователь однофазный; 750 –
номинальная выходная мощность по
переменному току
– преобразователь однофазный; 750 –
номинальная выходная мощность по
переменному току ;
;ПТ-1000
 – преобразователь трехфазный; 1000
– номинальная выходная мощность по
переменному току
– преобразователь трехфазный; 1000
– номинальная выходная мощность по
переменному току ;
;ПТО-300/500 – преобразователь трехфазный однофазный (комбинированный); 300/500 – соответственно, номинальные выходные мощности ПТ и ПО
 .
.
Недостатки электромашинных инверторов:
большой удельный вес
![]() ;
;
низкий КПД
 ;
;ограниченный срок эксплуатации, ввиду того, что они не обслуживаются в процессе эксплуатации;
ограниченная высотность применения;
повышенные радио- и магнитные помехи.
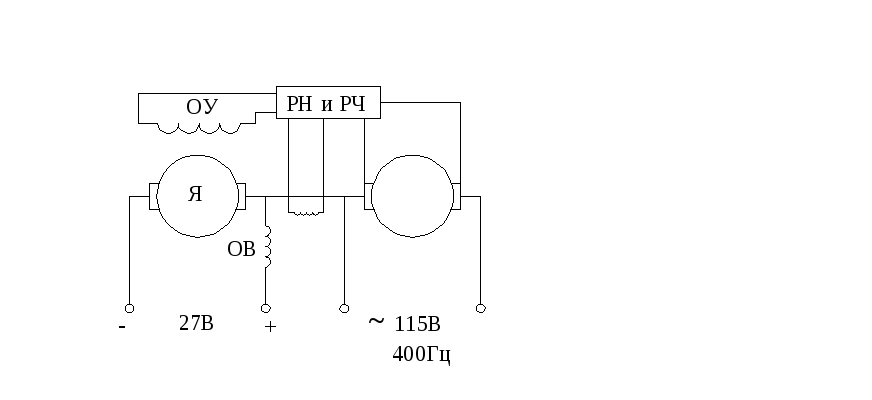
Рисунок 1.34 – Принципиальная схема электромашинного инвертора
Максимальная выходная мощность до
![]() .
.
Б) статические инверторы
Достоинства статических инверторов:
меньший удельный вес по сравнению с электромашинными инверторами
![]() ;
;
высокий КПД
 ;
;нет вращающихся частей, поэтому они более эксплуатационно-пригодны;
нет скользящих контактов, а, следовательно, не ограничения по высоте применения;
меньший уровень радио- и магнитных помех.
Недостатки статических инверторов:
чувствителен к радиационному фону.
Примеры статических инверторов:
ПОС-750 – преобразователь однофазный статический; 750 – номинальная выходная мощность по переменному току
 ;
;ПТС-1000 – преобразователь трехфазный статический; 1000 – номинальная выходная мощность по переменному току
 .
.
Статические инверторы бывают на:
транзисторах, если
 ;
;тиристорах, если
 .
.
Статические инверторы на транзисторах– это усилители с глубокой положительной обратной связью, приводящей его к самовозбуждению, работающие в режиме переключения.
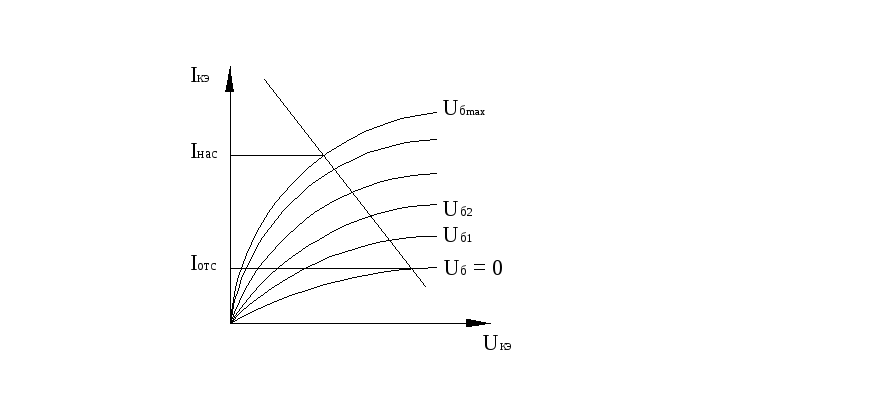

Рисунок 1.35 – График
зависимости ![]() .
.
Статические инверторы на тиристорах
Принцип действия
Основан на поочередном открытии с частотой, формируемой схемой управления 1го и 3го, а затем 2го и 4го тиристоров. Сначала сигнал подается на 1-3 – зарядка конденсатора, сигнал на 2-4 – конденсатор замкнут накоротко – разрядка конденсатора.
Тиристор – это управляемый электрод.
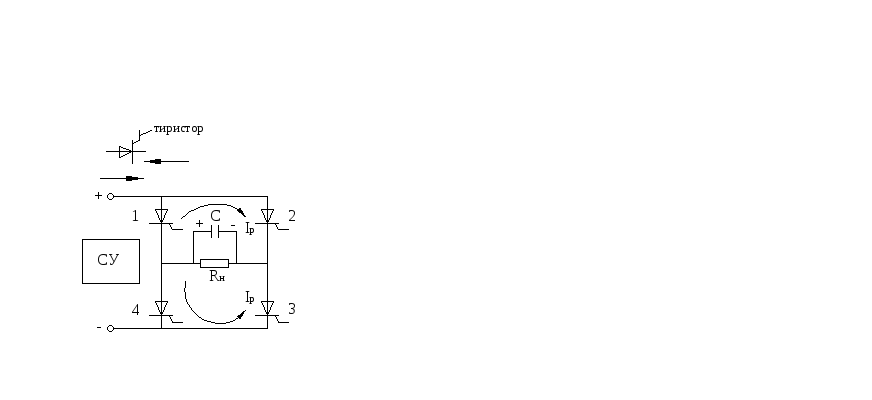
Рисунок 1.36 – Принципиальная схема статического инвертора на тиристорах.
1.3.4 Умформеры (преобразователи)
Умформеры– это преобразователи постоянного тока низкого напряжения в постоянный ток высокого напряжения.
Умформеры делятся на:
электромашинные;
статические.
а) электромашинные умформеры
Примеры электромашинных умформеров:
РУК-300
 – радио-умформер, комбинированный; 300
– номинальная выходная мощность
– радио-умформер, комбинированный; 300
– номинальная выходная мощность
 .
.
Принципиально, это двигатель и генератор в одном корпусе.
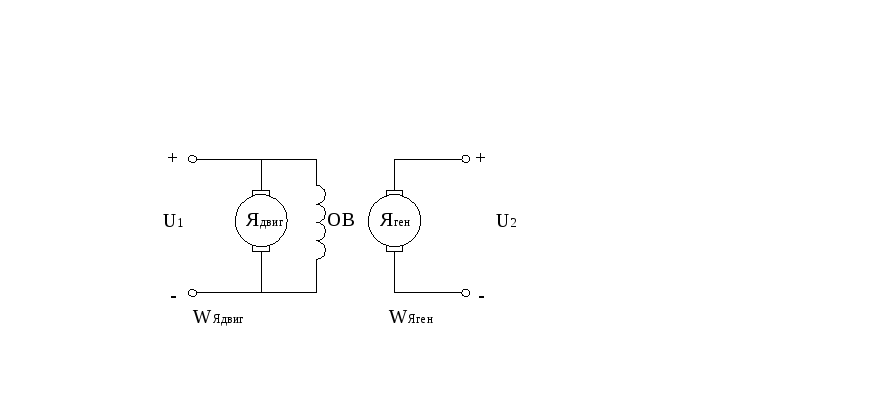
Рисунок 1.37 – Принципиальная схема электромашинного умформера.
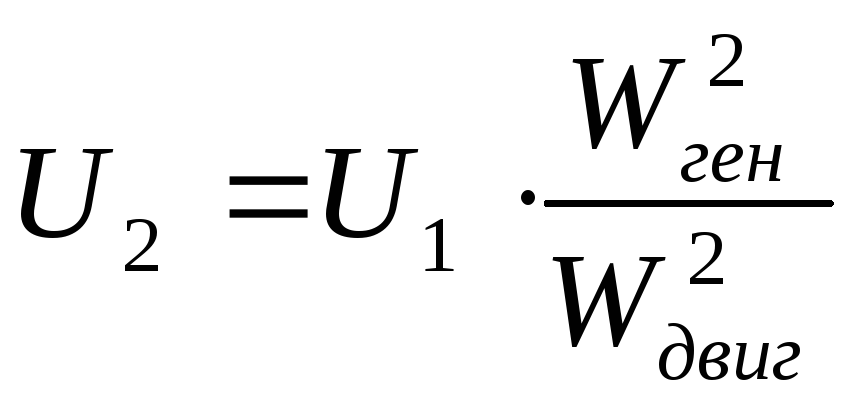 .
.
Им присущи те же недостатки, что и для электромашинных инверторов.
б) статические умформеры (конверторы)
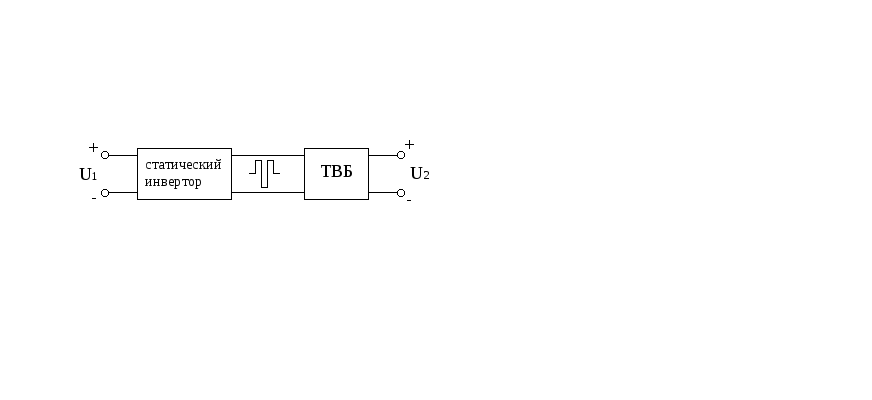
Рисунок 1.38 – Принципиальная схема статического умформера (конвертора):
ТВБ – трансформаторно-выпрямительный блок.
![]() .
.
1.3.5 Стабилизаторы
Стабилизаторы– это устройства, предназначенные для стабилизации параметров, как постоянного тока, так и переменного.
Используются в маломощных токовых цепях для стабилизации напряжения.

Рисунок 1.39 – График
зависимости ![]() .
.
2 Системы передачи и распределения электроэнергии (электрические сети)
По принципу действия различают два вида электрических сетей:
замкнутые;
радиальные.
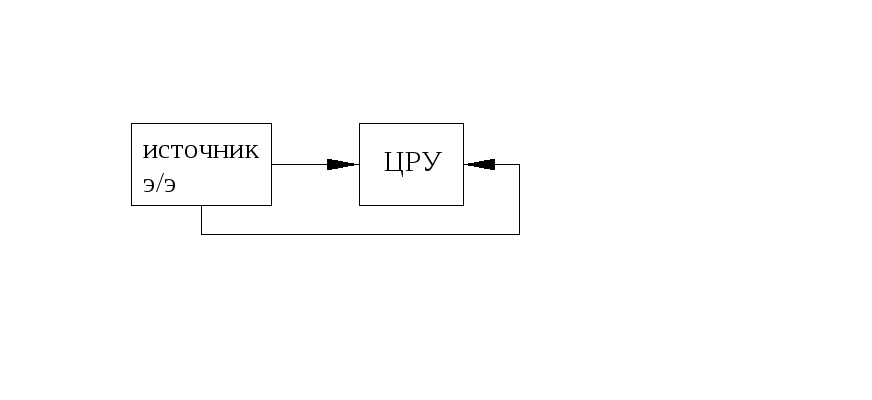
Рисунок 1.40 – Устройство замкнутой электрической сети:
ЦРУ – центральное распределительное устройство.

Рисунок 1.41 – Устройство радиальной электрической сети.

Рисунок 1.42 – Устройство магистральной электрической сети.
Электрическая сеть состоит из:
авиационных проводов;
распределительных устройств и монтажных (штепсельных разъемов);
коммутационной аппаратуры;
защитной аппаратуры.
Классификация электрических сетей
Постоянного и переменного тока.
Низкого тока
 ;
среднего
;
среднего ;
высокого
;
высокого .
.Одна-, двух-, трех- и четырехпроводные схемы.