

3.3.4 Бортовой автоматический радиокомпас
В основу работы БАРК положен метод минимумов.

Рисунок 3.42 – Устройство бортового автоматического радиокомпаса:
ЭД – электродвигатель; СПД – система передачи движения.
3.4 Системы ближней и дальней навигации
РНСБН и РНСДН– это системы, позволяющие определить местоположение ЛА путем определения линий местоположения.
3.4.1 Радионавигационная система ближней навигации (рнсбн)
Используются ультракороткие волны.
При
![]()
![]() .
.
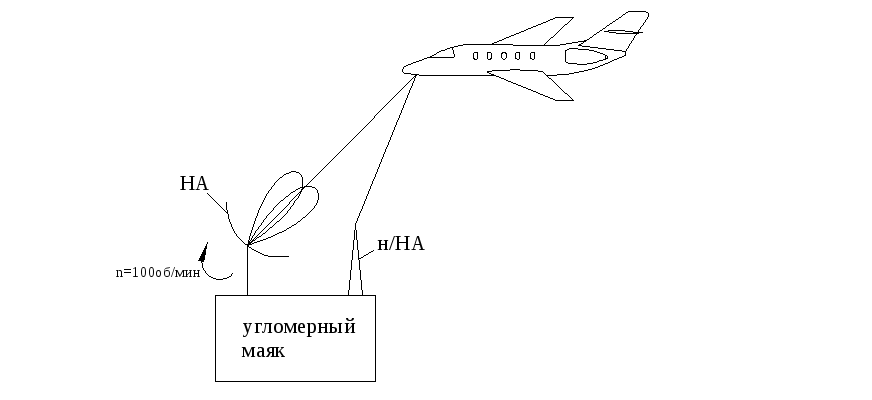

Рисунок 3.43 – Схема действия угломерного Рисунок 3.44 – Устройство дальномерного
радиомаяка: канала связи.
НА –направленная антенна;
н/НА – ненаправленная антенна.
Угол азимутаравен
![]() .
.
Определение дальности
![]() .
.
Российские РНСБН:РНСБН-2, РНСБН-4, РНСБН-6.
Зарубежная РНСБН –VOR.
3.4.2 Радионавигационная система дальней навигации (рнсдн)
При
![]()
![]() .
.
Определение дальности
![]() .
.
Если
![]() ,
то линия положение –гипербола
(гиперболические РНСДН).
,
то линия положение –гипербола
(гиперболические РНСДН).
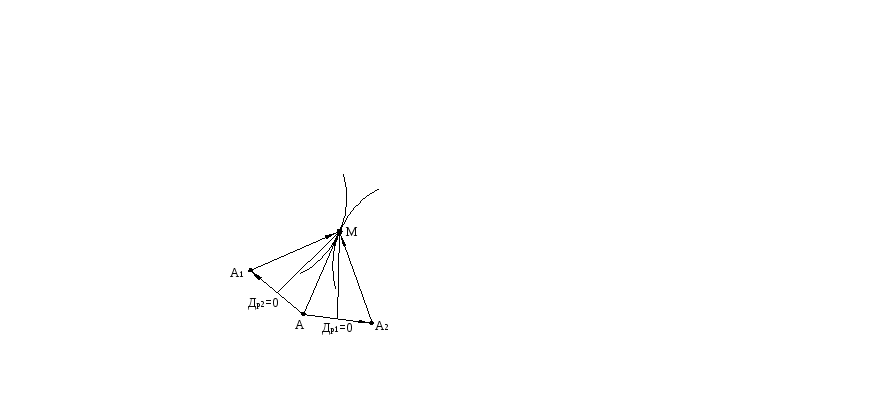
Рисунок 3.45 – Схема работы РНСДН.
Глобальная РНСДН – OMEGA,
имеющая 8 РС, расположенных на расстоянии![]() тыс.км.
тыс.км.
Зарубежная РНСДН –LORAN(разностно-дальномерная система).
Система OMEGAотносится к классу дальнометрических. Информация о дальности заложена в разностной фазе радиостанции и передатчика, находящегося на борту ЛА и строго-синхронизированного с наземными радиостанциями.
3.5 Доплеровский измеритель путевой скорости и угла сноса
ДИСС– это устройство, предназначенное для определения путевойскоростииугла сноса (скольжения).
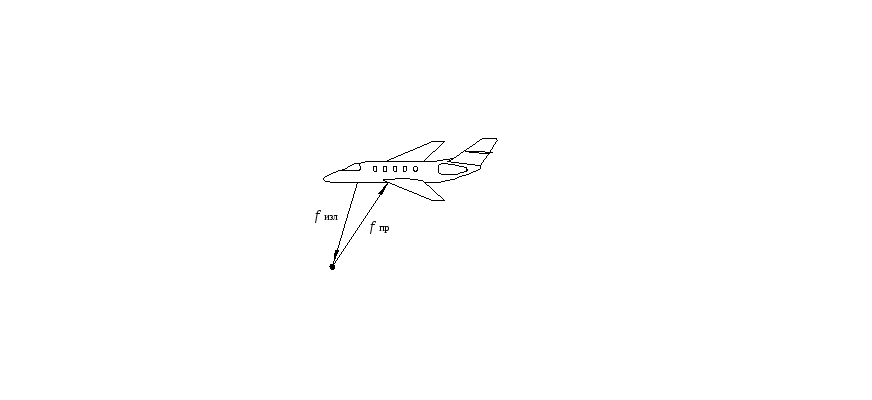
Рисунок 3.46 – Схема действия ДИСС.
Используется сантиметровый диапазон длин волн.
![]() .
.
Доплеровская частота![]() определяется, если самолет движется
относительно поверхности
определяется, если самолет движется
относительно поверхности
![]() ,
где
,
где
![]() - скорость движения ЛА.
- скорость движения ЛА.
Для выявления доплеровской частотычастота излучения![]() должна бытьв ГГц диапазоне длин волн.
должна бытьв ГГц диапазоне длин волн.
![]() можно уловитв кГц диапазоне длин
волн.
можно уловитв кГц диапазоне длин
волн.
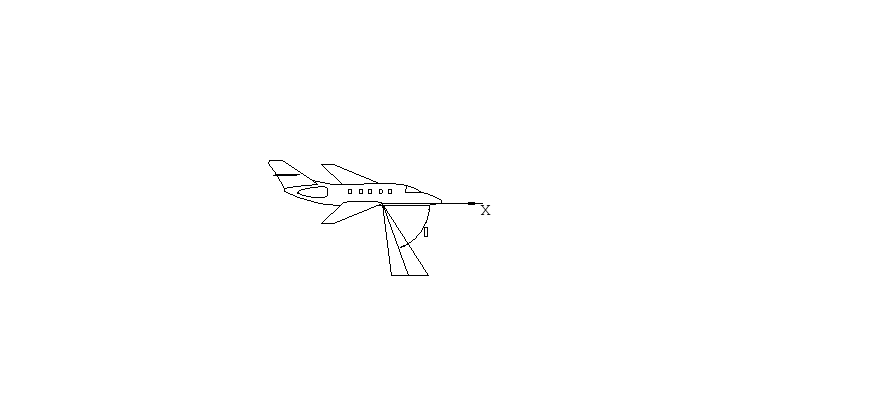
Рисунок 3.47 – Схема действия доплеровской частоты.
![]() - угол наклона луча.
- угол наклона луча.

Рисунок 3.48 – Определение доплеровской частоты.
![]() ;
;
![]() .
.
Поворот антенны происходит до тех пор,
пока
![]() ,
а это произойдет, когда
,
а это произойдет, когда![]() .
.
![]() -угол сноса.
-угол сноса.
![]() ,
т.е.
,
т.е.![]() - антенна направлена по направлению
путевой скорости.
- антенна направлена по направлению
путевой скорости.
4 Радиолокационное оборудование
РЛО– это комплекс радиотехнических устройств, предназначенных для:
ориентации экипажа при отсутствии видимость земной поверхности;
определения грозовых фронтов;
обнаружения и наведения на те или иные объекты и цели;
предупреждения об опасном сближении и столкновении;
предупреждения об облучении ЛА и др. задач.
Принцип действия РЛО
Основан на отражении электромагнитных
волн от предметов, размеры которых
превышают длину волны
![]() .
.
По принципу действия РЛС делятся на:
активные РЛС,к которым относятся:
станции наблюдения земной поверхности;
станции предупреждения об облучении;
метео-РЛС.
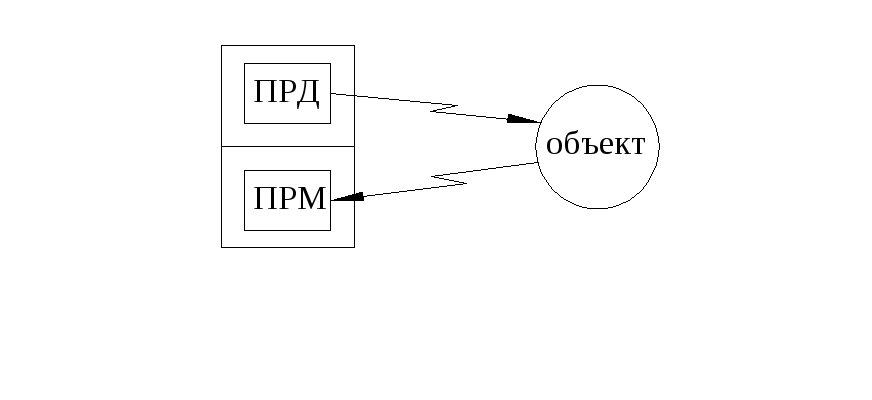
Рисунок 3.49 – Устройство активной РЛС.
пассивные РЛС (имеющие только приемник);
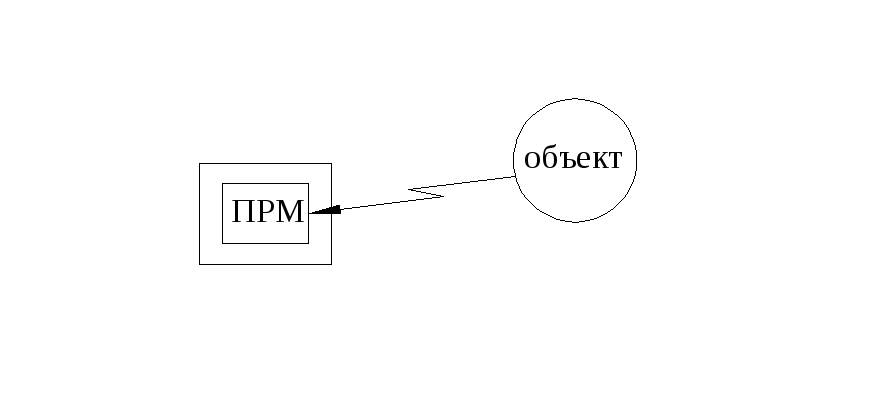
Рисунок 3.50 – Устройство пассивной РЛС.
полуактивные РЛС (используемые для опознавания ЛА)
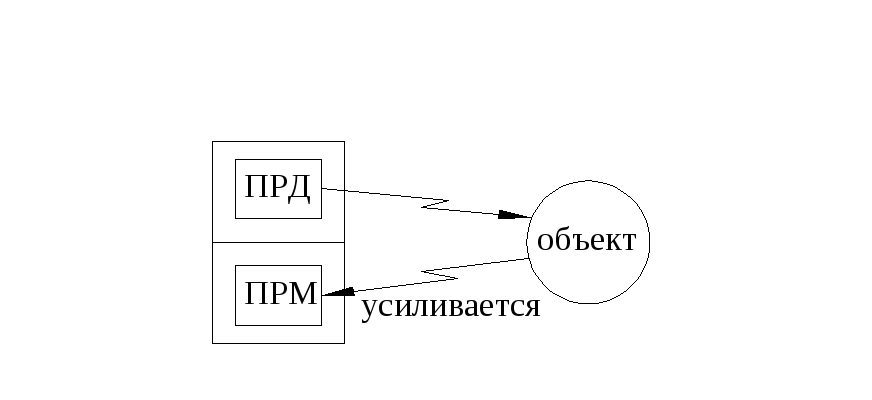
Рисунок 3.51 – Устройство полуактивной РЛС.