

4.4.4 Астрономический компас
Астрокомпас– это автономный курсовой прибор.
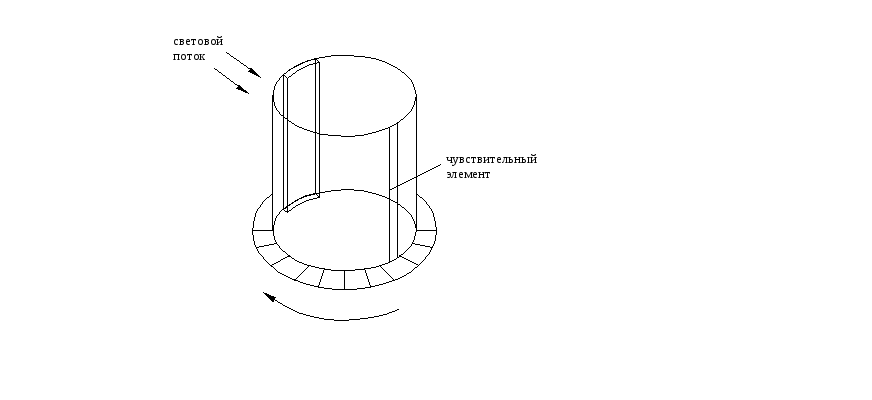
Рисунок 2.64 – Астрономический компас.
Принцип действия
Основан на пеленгации небесных светил с учетом местоположения ЛА и вращения Земли.
Пеленг– это определение угла между продольной осью самолета и объектом.
Астрокомпасы подразделяются по:
способу автоматизации:
а) ручные;
б) полуавтоматические;
в) автоматические.
виду пеленгуемых светил:
а) солнечные;
б) лунные;
в) звездные.
виду ориентации плоскости пеленгации:
а) горизонтальные;
б) экваториальные.
Основные элементы астрокомпаса:
устройства для задания координат ЛА (широты и долготы);
часовой механизм, учитывающий вращение Земли;
пеленгационная головка – чувствительный элемент;
устройство для съема информации.
4.4.5 Гирополукомпас
Это 3х степенной гироскоп с горизонтально расположенной осью собственного вращения.Гирополукомпас не имеет собственной направляющей силы, устанавливающей вектор собственного вращения в плоскости какого-либо меридиана.
Угол курса![]() – это угол поворота корпуса относительно
оси
– это угол поворота корпуса относительно
оси![]() - оси вращения наружной рамки.
- оси вращения наружной рамки.
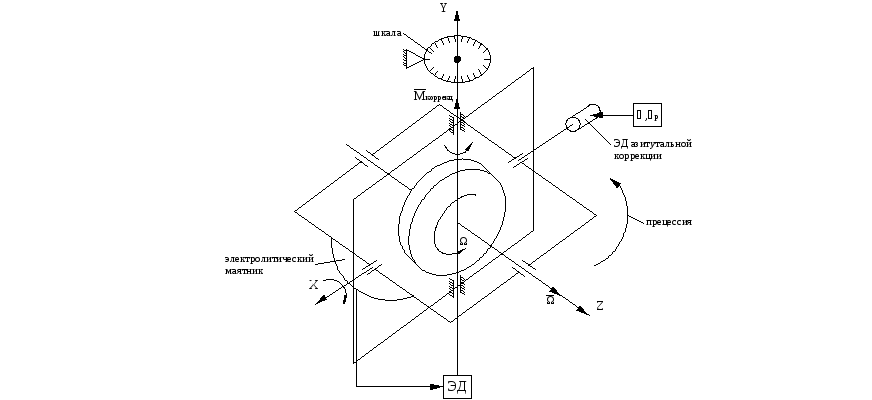
Рисунок 2.65 – Гирополукомпас.
Принцип действия системы горизонтальной коррекции
В случае ухода (отклонения) вектора собственного вращения из плоскости горизонта с электролитического маятника, расположенного на внутренней рамке, снимается сигнал, который поступает на ЭД, расположенный на оси вращения наружной рамки. Этот ЭД создает момент вдоль оси вращения наружной рамки, и гироскоп начинает прецессировать, стремясь совместить вектор собственного вращения с вектором этого момента, и при этом он возвращается в плоскость горизонта.
За счет вращения Земли происходит уход
![]() .
Для компенсации ухода оси собственного
вращения в горизонтальной плоскости
применяетсяазимутальная коррекции
(АК)гирополукомпаса.
.
Для компенсации ухода оси собственного
вращения в горизонтальной плоскости
применяетсяазимутальная коррекции
(АК)гирополукомпаса.
В роли азимутального корректоравыступаетгироиндукционный компас– прибор, состоящий из гироскопического и индукционного датчиков, который постоянно приводит ось собственного вращения в плоскость магнитного меридиана.
4.5 Приборы для измерения угловых скоростей полета
4.5.1 Скоростной (двухстепенной) гироскоп
Скоростной (двухстепенной) гироскоп или указатель поворотапредназначен дляопределения угловой скорости вращения(разворота, поворота).
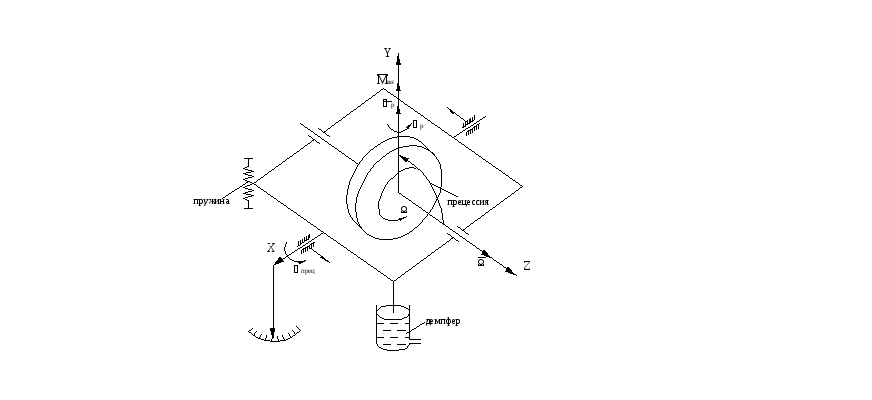
Рисунок 2.66 – Скоростной (двухстепенной) гироскоп.
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
![]() .
.
Принцип действия
Самолет разворачивается относительно
вертикальной оси
![]() .
Гироскоп стремится сохранить вектор
собственного вращения
.
Гироскоп стремится сохранить вектор
собственного вращения![]() в неизменном положении. Но он лишен
степени свободы, а поэтому принудительно
вместе с корпусом происходит поворот
вектора собственного вращения. В
результате возникают силы реакции в
опорах рамки (подшипниках), которые
создают внешний момент относительно
оси
в неизменном положении. Но он лишен
степени свободы, а поэтому принудительно
вместе с корпусом происходит поворот
вектора собственного вращения. В
результате возникают силы реакции в
опорах рамки (подшипниках), которые
создают внешний момент относительно
оси![]() ,
совпадающий с вектором угловой скорости
разворота. В результате гироскоп начинает
прецессировать, т.е. поворачиваться
относительно оси
,
совпадающий с вектором угловой скорости
разворота. В результате гироскоп начинает
прецессировать, т.е. поворачиваться
относительно оси![]() ,
стремясь совместить вектор собственного
вращения с вектором момента внешних
сил. Этот момент прецессии
,
стремясь совместить вектор собственного
вращения с вектором момента внешних
сил. Этот момент прецессии![]() уравновешивается моментом пружины
уравновешивается моментом пружины![]() ,
а значит, каждому значению угловой
скорости разворота
,
а значит, каждому значению угловой
скорости разворота![]() соответствует определенный угол
отклонения рамки
соответствует определенный угол
отклонения рамки![]() .
.
Датчик угловой скоростипредназначен для измерения угловой скорости относительно оси, перпендикулярной оси собственного вращения гироскопа и оси вращения рамка.