

4.3.3 Определение вертикальной скорости полета
Определение вертикальной скорости полета основано на:
измерении скорости изменения статического давления;
дифференцировании показаний радиовысотомера
 ;
;интегрировании вертикальных ускорений
 ;
;измерении вертикальной составляющей истинной воздушной скорости

4.3.4 Комбинированный указатель скорости (кус)

Рисунок 2.50 – Комбинированный указатель скорости.
![]() ,
где
,
где
![]() - учет сжимаемости воздуха.
- учет сжимаемости воздуха.
![]() .
.
При
![]()
![]() ;
при
;
при![]()
![]() .
.
4.3.5 Вариометры
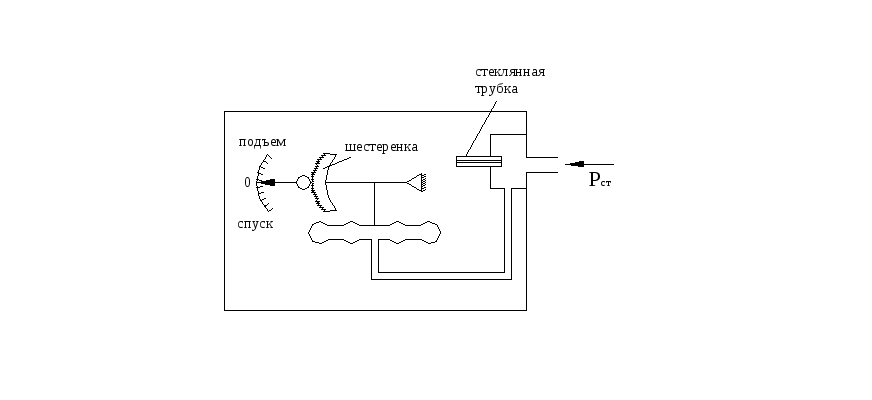
Рисунок 2.51 – Вариометр.
Принцип действия
Основан на измерении избыточного давления (разряжения) при изменении высоты полета внутри замкнутого объема, сообщающегося с атмосферой через капиллярные отверстия.

Рисунок 2.52 – Устройство датчика ускорения.
![]() .
Если
.
Если![]() ,
то
,
то![]() .
.
Систему воздушных сигналов СВС(на гражданских ЛА) ицентраль скорости и высоты ЦСВ (на боевых ЛА) называютцентрализованными устройствами, которые по сигналам датчиков первичных параметров и ручных задатчиков, определяют необходимые параметры скорости и высоты полета и выдают их всем потребителям на борту.

Рисунок 2.53 – Устройство бортовых цифровых вычислительных машин:
АЦП – аналого-цифровой преобразователь; ВУ – вычислительное устройство;
ЦАП – цифро-аналоговый преобразователь.
4.4 Приборы для измерения курса полета
Курс полета– это угол![]() между плоскостью какого-либо меридиана
и проекцией продольной оси самолета на
плоскость горизонта, и отсчитанный от
северного направления меридиана по
часовой стрелке.
между плоскостью какого-либо меридиана
и проекцией продольной оси самолета на
плоскость горизонта, и отсчитанный от
северного направления меридиана по
часовой стрелке.

Рисунок 2.54 – Курсы полета самолета.
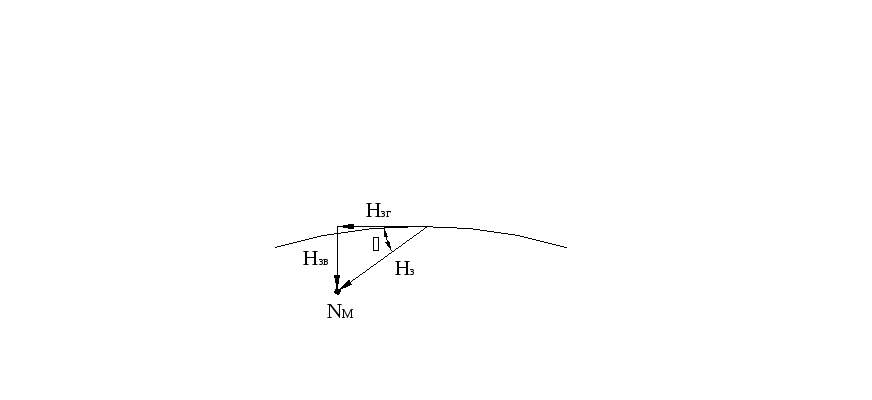
Рисунок 2.55 – Магнитное наклонение:
![]() - угол магнитного
наклонения.
- угол магнитного
наклонения.
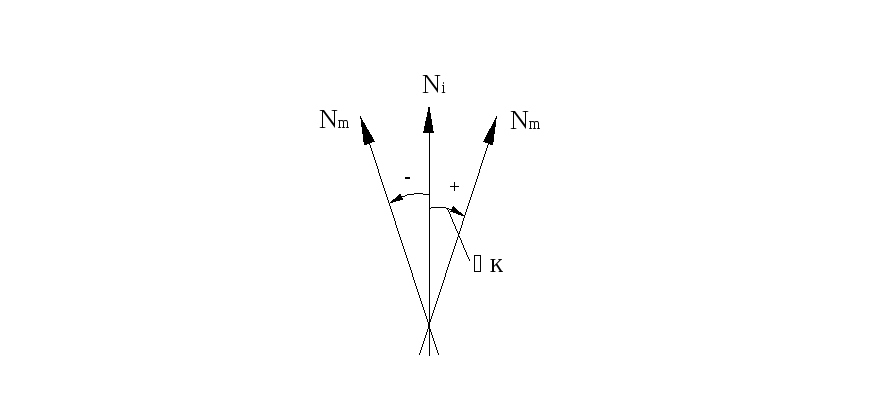
Рисунок 2.56 –
Магнитное склонение![]() .
.
Изогона– линия равного магнитного склонения.

Рисунок 2.57 –
Магнитная девиация
![]() .
.
Виды магнитной девиации:
постоянная(обусловленная погрешностью установки);
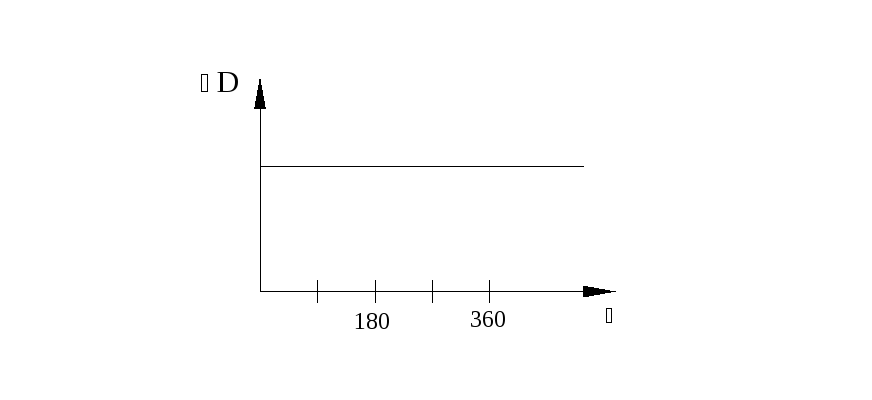
Рисунок 2.58 – График
зависимости ![]() .
.
полукруговая(обусловленная наличием магнитотвердых материалов на борту ЛА – постоянных магнитов);

Рисунок 2.59 – График
зависимости ![]() .
.
четвертная(обусловленная наличием магнитомягких материалов на борту ЛА, намагничивающихся в слабых магнитных полях).

Рисунок 2.60 – График
зависимости ![]() .
.
4.4.1 Методы определения угла курса
Магнитный.
Индукционный.
Гироскопический.
Астрономический.
Радиоскопический.
4.4.2 Магнитный компас
С помощью магнитного компаса на полюсах курс определить невозможно.
Магнитный компас– это аварийное устройство.
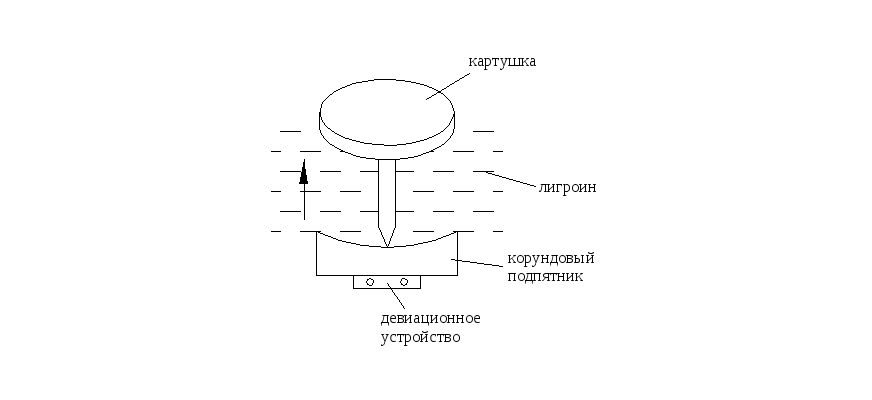
Рисунок 2.61 – Магнитный компас.
4.4.3 Индукционный компас
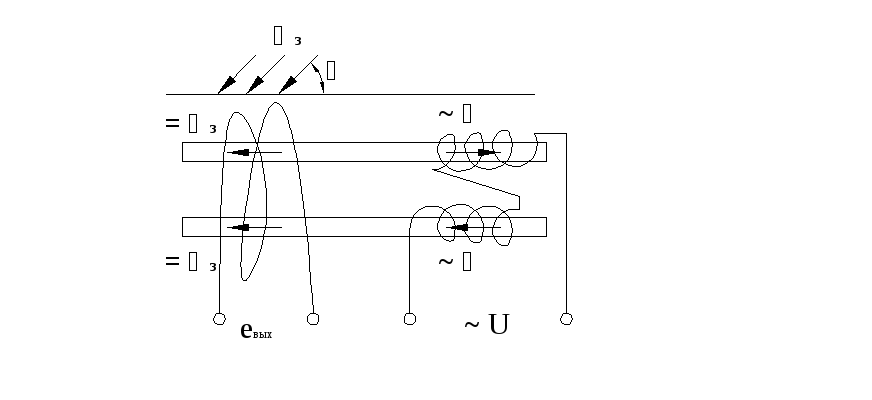
Рисунок 2.62 – Схема индукционного компаса.
Магнитная проницаемостьравна
![]() ,
где
,
где
![]() - магнитная индукция;
- магнитная индукция;
![]() -
напряженность электромагнитного поля.
-
напряженность электромагнитного поля.
![]() ,
,![]() ,
где
,
где
![]() - магнитное сопротивление.
- магнитное сопротивление.
![]() .
.
Принцип действия
Основан на наведении ЭДС в выходной обмотке чувствительного элемента под действием постоянного магнитного поля Земли, зависящей от угла курса.
Постоянное магнитное поле Земли создает в магнитных стержнях постоянные магнитный поток, который не может привести ЭДС в выходной обмотке, т.к. он постоянен. Поэтому прибегают к искусственному приему, преобразуя этот постоянный магнитный поток в переменный с помощью специальной обмотки переменного тока. Эта обмотка создает в магнитных стержнях переменные магнитные потоки, направленные в противоположные сторон, которые не наводят ЭДС в выходной обмотке. Но эти магнитные потоки изменяют магнитную проницаемость сердечника и их магнитное сопротивление с двойной частотой по отношению к частоте питающего напряжения. И это меняющееся магнитное сопротивление сердечника приводит к изменению постоянных магнитных потоков Земли в стержне, которые затем наводят в выходной обмотке ЭДС, зависящую от угла курса.

Рисунок 2.63 – Устройство индукционного компаса.