

4.5.2 Интегрирующий гироскоп
Применяется в автопилотах для уменьшения статической погрешности.
Аналогичен скоростному (двухстепенному) гироскопу, только без наличия пружины.
![]() ,
,![]() ;
;![]() .
.

Рисунок 2.67 – Интегрирующий гироскоп.
Принцип действия
При развороте самолета относительно
вертикальной оси
![]() по аналогии со скоростном (двухстепенном)
гироскопом в опорах рамки (подшипниках)
возникают силы реакции. В результате
гироскоп начинает прецессировать
относительно оси
по аналогии со скоростном (двухстепенном)
гироскопом в опорах рамки (подшипниках)
возникают силы реакции. В результате
гироскоп начинает прецессировать
относительно оси![]() .
При этом в демпфере возникает сила,
пропорциональная вектору угловой
скорости прецессии
.
При этом в демпфере возникает сила,
пропорциональная вектору угловой
скорости прецессии![]() .
Эта сила создает момент относительно
оси
.
Эта сила создает момент относительно
оси![]() .
В результате этого гироскоп начинает
прецессировать и в горизонтальной
плоскости относительно оси
.
В результате этого гироскоп начинает
прецессировать и в горизонтальной
плоскости относительно оси![]() ,
и эта угловая скорость прецессии не
может быть иной, как угловая скорость
самолета
,
и эта угловая скорость прецессии не
может быть иной, как угловая скорость
самолета![]() .
В результате устанавливается такая
угловая скорость разворота рамки
относительно оси
.
В результате устанавливается такая
угловая скорость разворота рамки
относительно оси![]() ,
которая равна угловой скорости поворота
самолета. А угол поворота рамки
,
которая равна угловой скорости поворота
самолета. А угол поворота рамки![]() будет равен интегралу от угловой скорости
поворота самолета
будет равен интегралу от угловой скорости
поворота самолета![]() .
.
4.6 Приборы для измерения угла крена и тангажа
4.6.1 Авиагоризонт
Предназначен для определения углов
крена![]() итангажа
итангажа ![]() ,
и представляет собой3х степенной
гироскоп с вертикально расположенной
осью собственного вращения.
,
и представляет собой3х степенной
гироскоп с вертикально расположенной
осью собственного вращения.
Определение угловых координат 3х степенным гироскопом основано на 1ом свойстве гироскопов– сохранять неизменным свое положение в пространстве.
Поэтому 3х степенной гироскоп может измерять только две угловые координаты, совпадающие с осями вращения рамок гироскопа, и не может измерять угловую координату относительно оси собственного вращения.
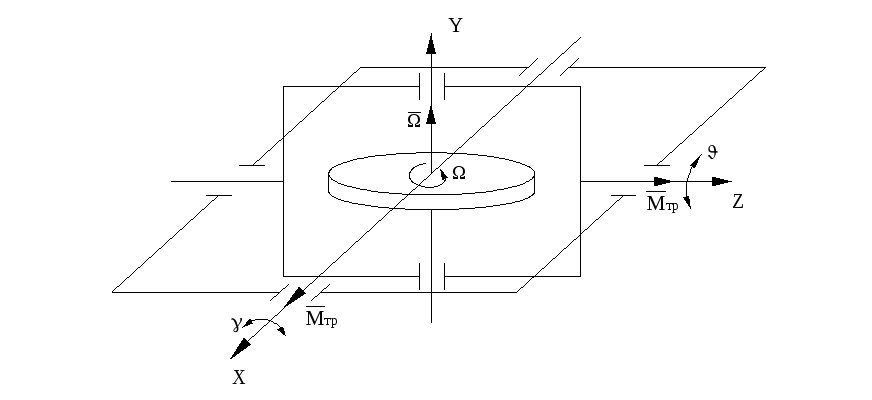
Рисунок 2.68 – Авиагоризонт.
![]() - находится в плоскости горизонта.
- находится в плоскости горизонта.
При данной схеме расположения рамок угол кренаопределяется как угол поворота корпуса прибора относительно оси вращения наружной рамки, аугол тангажа– как угол поворота наружной рамки относительно оси вращения внутренней рамки.
Угловая скорость ухода Землиравна
![]() ;
;
![]() .
.
Вращение Земли происходит
![]() в час.
в час.
Для устранения ухода оси собственного вращения от вертикали применяют системы вертикальной коррекции (СВК)гироскопа. Наиболее распространенным вариантом является вариант с использованиемэлектролитического маятника (уровня),электроды которого смочены на половину. При повороте смоченные поверхности неуравновешенны – один электрод смочен на половину, другой – сухой. В результате этого изменяется сопротивление, и соленоид меняет положение, смещая центр масс. Гироскоп, прецессируя, возвращается в прежнее положение.

Рисунок 2.69 – Устройство электролитического маятника (уровня).
Аналогом авиагоризонта является гировертикаль, выдающая информацию об углах крена и тангажа в виде электронных сигналов. Для повышения точности информации применяютцентрализованные (центральные) гировертикали.

Рисунок 2.70 – Гировертикаль.
4.7 Приборы для определения широты и долготы
4.7.1 Навигационно-автоматические координаторы (нак)
Навигационно-автоматические координаторы
(НАК)– это устройства, определяющее
местоположение ЛА (координаты:широту
![]() идолготу
идолготу![]() ).
).
К ним относятся:
системы, основанные на счислении пройденного путипо известным навигационным параметрам (скорости, угле курса и т.д.);
радиотехнические системы навигации, основанные на определении местоположение ЛА относительно радионавигационных точек (маяков) со строгоизвестным местоположением;
инерциальные системы навигации,основанные на интегрировании ускорений.
спутниковые системы навигации(GPS, ГЛОНАСС – Глобальная Авианавигационная Автоматическая Спутниковая Система).