

А) Привод генератора переменного тока
Привод генератора переменного тока осуществляется:
приводом от вала авиационного двигателя (АД)
![]() ;
;
с помощью привода постоянной частоты вращения (ППЧВ)
 или с помощью привода постоянной
скорости вращения (ППСВ);
или с помощью привода постоянной
скорости вращения (ППСВ);с помощью автономного привода.
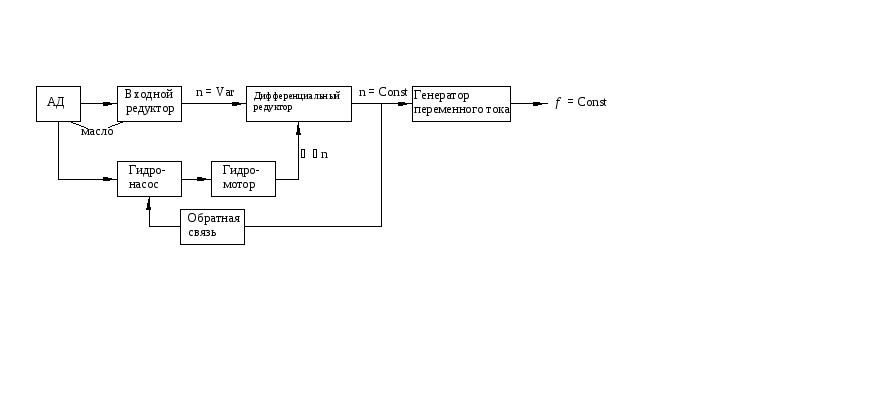
Рисунок 1.23 – Устройство привода постоянной частоты вращения (ППЧВ).
Также существуют конструкции:
интегрального привода генератора (ИПГ);
компактного генератора постоянной частоты (КГПЧ);
генератора переменной скорости, постоянной частоты (ГПСПЧ)
 .
.
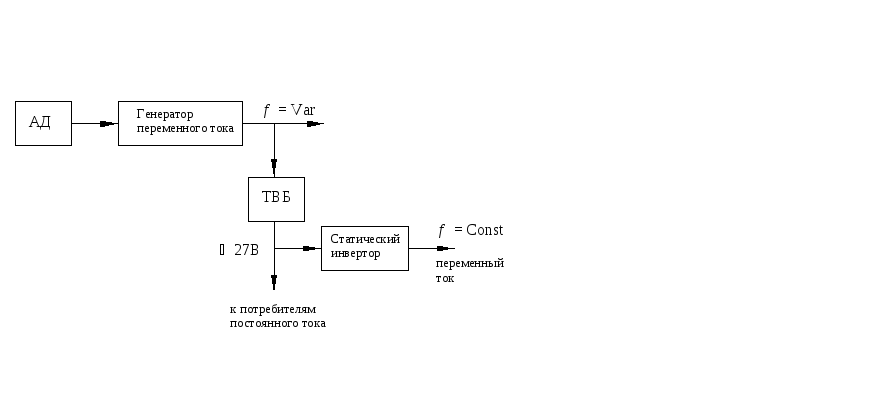
Рисунок 1.24 – Устройство привода постоянной скорости вращения (ППСВ).

Рисунок 1.25 – Устройство системы с циклоинвертором.
Б) Параллельная работа генераторов переменного тока
![]() .
.
Условия параллельной работы генераторов переменного тока:
равенство амплитуд
 ;
;равенство частот
 ;
;отсутствие сдвига по фазе
 ;
;равенство активных сопротивлений
 ;
;равенство реактивных сопротивлений
 .
.
Синхронизация– процесс выполнения условий параллельной работы генераторов.
Синхронизаторы– устройства, обеспечивающие синхронизацию.
Синхронизация бывает:
грубая– внешнее выравнивание напряжений (возникают колоссальные динамические нагрузки);
точная– сравнивание напряжений
 и
и ,
и нахождение разностного напряжения
–напряжения биения
,
и нахождение разностного напряжения
–напряжения биения  ,
которое выравнивается через выпрямитель.
,
которое выравнивается через выпрямитель.
Включение генераторов осуществляется, когда напряжение биения близко к нулю.
1.2.3 Перспективы развития электромашинных генераторов
Повышение напряжения, т.к. это уменьшает потери энергии
![]() .
.
Применение новых магнитных редкоземельных материалов (РЗМ)– самария и кобальта.
Применение криогенной техники– использованиеэффекта сверхпроводимости
![]() ,
,![]() .
.
![]() .
.
1.3 Вторичные источники энергии
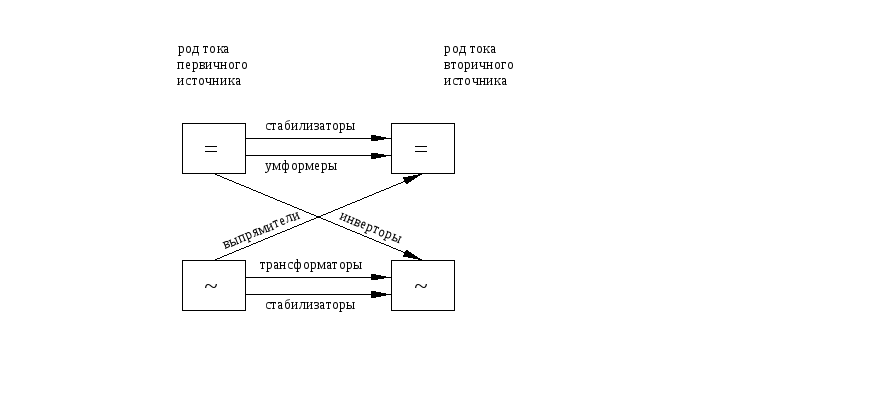
Рисунок 1.26 – Вторичные источники энергии.
![]() ;
;
![]() .
.
До
![]() электроэнергии идет без преобразования.
электроэнергии идет без преобразования.
1.3.1 Трансформаторы
Трансформаторы– это устройства, преобразующие переменный ток одного напряжения в переменный ток другого напряжения.
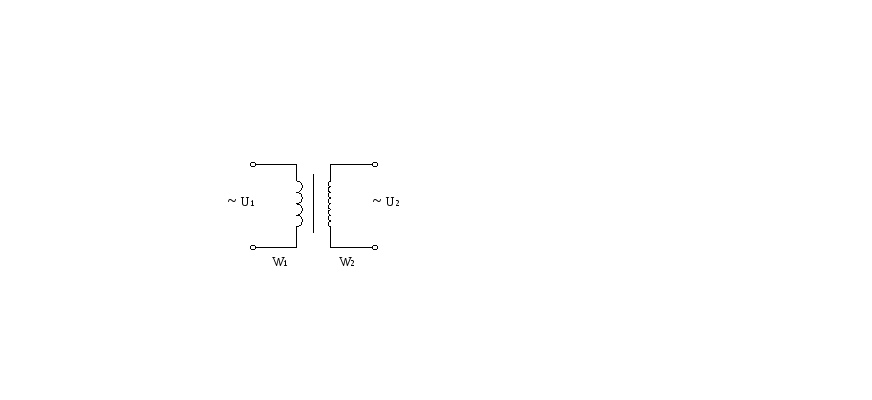
Рисунок 1.27 – Принципиальная схема трансформатора.
![]() ,
,![]() ,
где
,
где
![]() - коэффициент трансформатора;
- коэффициент трансформатора;
![]() - соответственно напряжение и магнитный
поток первичной катушки;
- соответственно напряжение и магнитный
поток первичной катушки;
![]() - соответственно напряжение и магнитный
поток вторичной катушки.
- соответственно напряжение и магнитный
поток вторичной катушки.
Сердечник трансформаторавыполнениз электротехнической стали, если
частота тока![]() ,
либо изферрита, если частота тока
,
либо изферрита, если частота тока![]() .
.
Сердечник трансформаторасостоит из тонких пластин, толщина которых определяется по формуле
![]() .
.
КПД трансформатораопределяется формулой
![]() .
.
Погрешность по мощностиравна
![]() ,
где
,
где
![]() - общая погрешность из-за меди;
- общая погрешность из-за меди;
![]() - погрешность сердечника из-за стали.
- погрешность сердечника из-за стали.
1.3.2 Выпрямители
Выпрямители– это полупроводниковые или электровакуумные устройства, обладающие свойством односторонней проводимости.
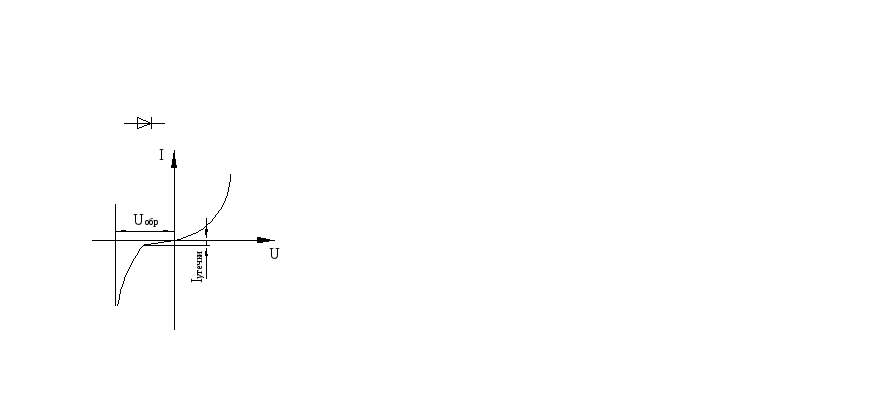
Рисунок 1.28 – График
зависимости ![]() .
.
КПД выпрямителясоставляет![]() .
.
![]() ;
;
![]() .
.
Выпрямители, как правило, применяются совместно с трансформаторами – трансформаторно-выпрямительные блоки (ТВБ).
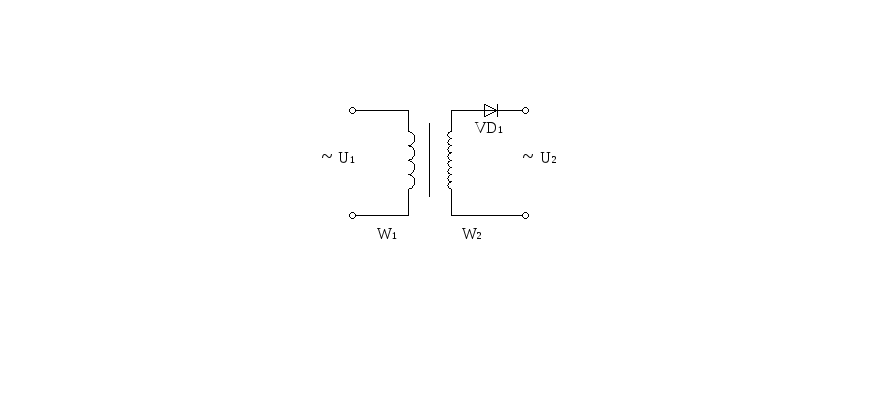
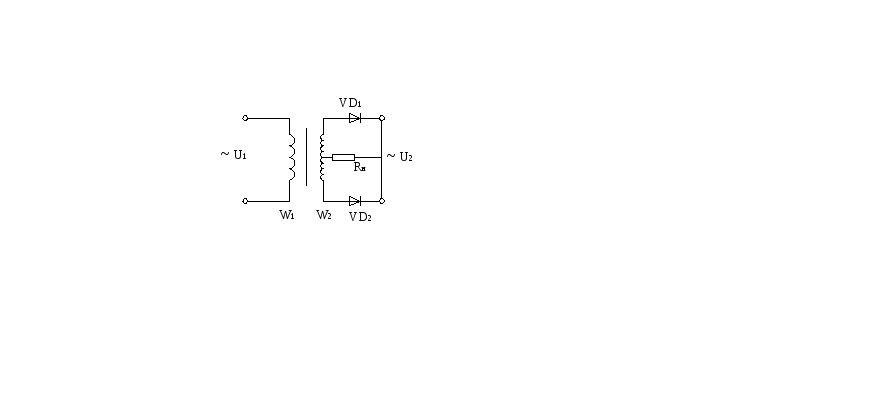
Рисунок 1.29 – Принципиальная схема Рисунок 1.30 – Принципиальная схема
однополупериодного выпрямителя. двухполупериодного выпрямителя.
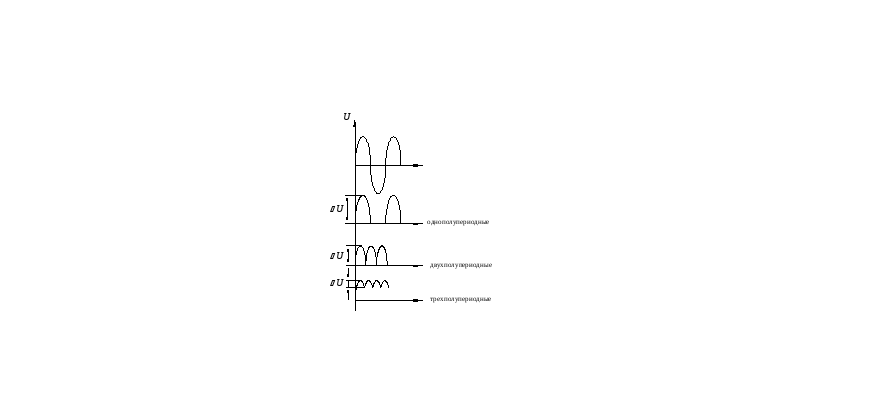
Рисунок 1.31 – Графики сглаживания пульсаций.
Коэффициент пульсацииопределяется формулой
![]() .
.
Для сглаживания пульсаций применяются
фильтры
![]() .
.
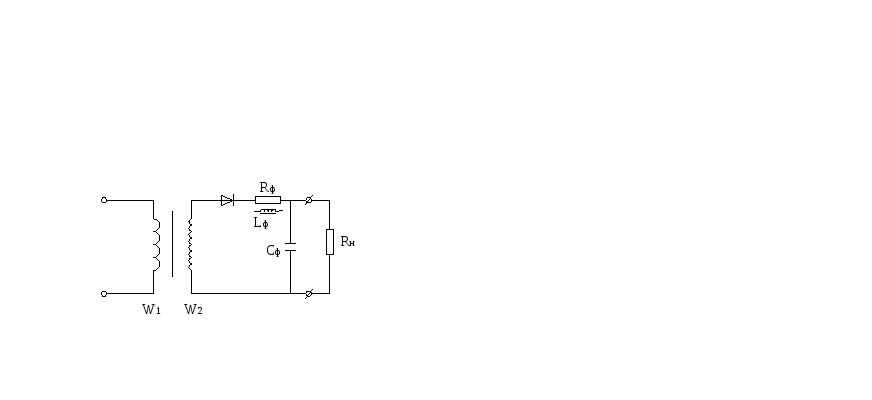

Рисунок 1.32 – Принципиальная схема для Рисунок 1.33 – Графики сглаживания
сглаживания
пульсаций с фильтрами
![]() .
пульсаций.
.
пульсаций.
Постоянная времени фильтра, характеризующая спад, рассчитывается по формуле
![]() .
.
![]() .
.
Более эффективен дроссельный фильтр
![]() .
.