

4.1.5 Гироскоп с магнитным типом подвеса ротора
![]() ,
где
,
где
![]() - магнитная проницаемость;
- магнитная проницаемость;
![]() - магнитная индукция;
- магнитная индукция;
![]() -
напряженность электромагнитного поля.
-
напряженность электромагнитного поля.

Рисунок 2.43 – Устройство гироскопа с магнитным типом подвеса ротора.
4.1.6 Криогенный гироскоп

Рисунок 2.44 – Криогенный гироскоп.
Принцип действия
Тонкостенная полая сфера с тяжелым ободом приводится во вращение с большой угловой скоростью с помощью катушки разгона. В зазоре между корпусом и ротором находится вакуум. Корпус представляет собой сосуд Дюара, который обеспечивает эффект сверхпроводимости.Ротор выполнен изсверхпроводящего металла– необия, в котором под действием катушки намагничивания возникают вихревые токи, создающие поле, которое препятствует проникновению магнитного поля внутрь ротора. Силы взаимодействия магнитного поля, создаваемого электромагнитами, и поля от вихревых токов удерживают ротор в подвешенном состоянии.
4.1.7 Лазерный гироскоп
Это миниатюрное устройство.

Рисунок 2.44 – Устройство лазерного гироскопа:
1 – лазер; 2 – зеркало; 3 – полупрозрачное зеркало; 4 – фотодетектор; 5 – частотомер;
6 – регистрационное устройство.
![]() ,
,![]()
![]()
![]() ;
;
![]() .
.
![]() ,
,![]() ,
где
,
где
![]() - расстояние по направлению движения
луча;
- расстояние по направлению движения
луча;
![]() - расстояние на встречу движению луча.
- расстояние на встречу движению луча.
![]() ,
,![]() .
.
![]() ,
где
,
где
![]() .
.
![]() .
.
Достоинства:
быстрое введение в рабочее положение;
малая масса.
4.2 Приборы для измерения высоты полета
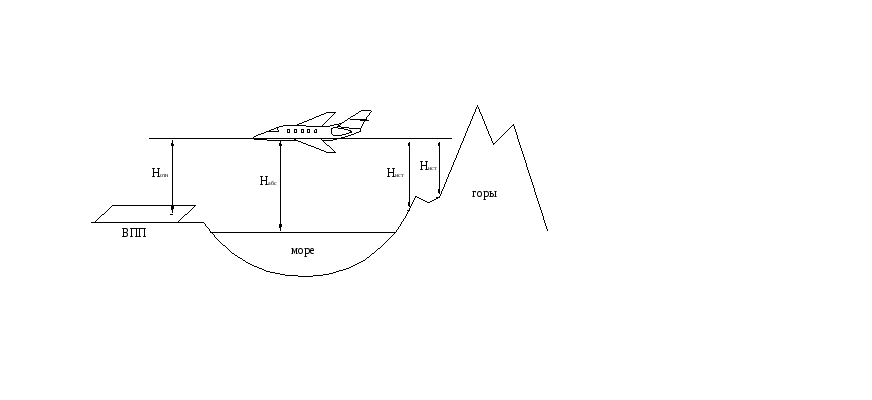
Рисунок 2.45 – Высоты полета в зависимости от местности.
Для измерения высоты полета используются методы:
истинной
 -радиотехнический;
-радиотехнический;относительной
 и абсолютной
и абсолютной –барометрический
–барометрический  .
.
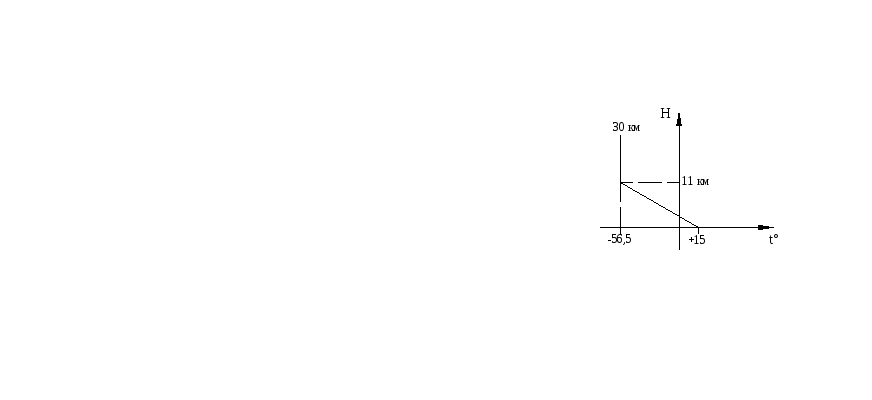
Рисунок 2.46 – График
зависимости ![]() .
.
При
![]()
![]() ,
где
,
где
![]() - температурный градиент,
- температурный градиент,![]() ;
;
![]() - температура на уровне моря
- температура на уровне моря![]() ;
;
![]() - универсальная газовая постоянная;
- универсальная газовая постоянная;
![]() - статическое (окружающее) давление.
- статическое (окружающее) давление.

Рисунок 2.47 – Устройство обогреваемого приемника воздушного давления.
При
![]()
![]() .
.
Обогрев включается в момент убора шасси.
4.2.1 Приборы для измерения абсолютной высоты полета
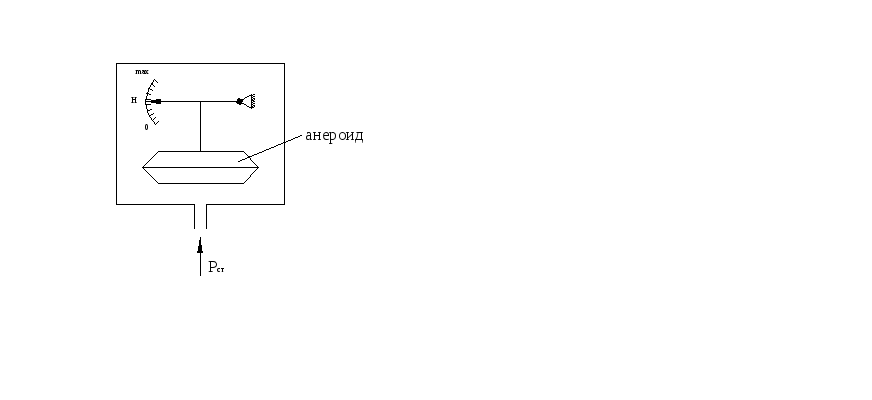
Рисунок 2.48 – Датчик высоты ДВ-15.
![]()
4.2.2 Приборы для измерения относительной высоты полета
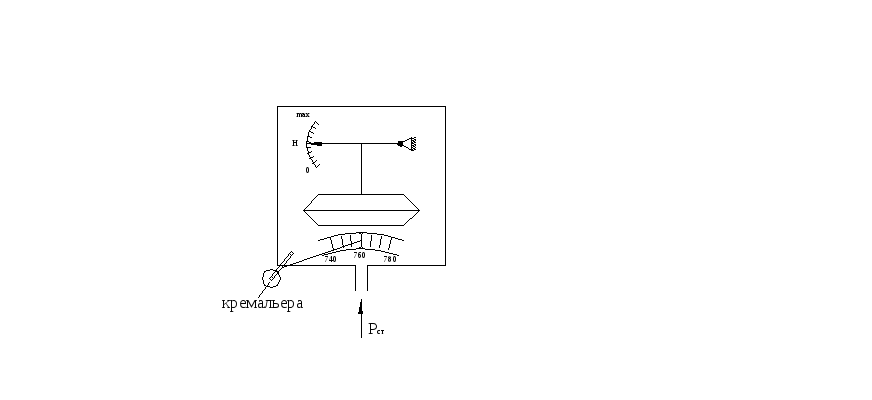

Рисунок 2.49 – Датчик относительной высоты полета.
Принцип действия
Кремальера – ручка устанавливает корректировку.
4.3 Приборы для измерения скорости полета
4.3.1 Виды скоростей полета
Истинная воздушная
 (относительно воздушной среды).
(относительно воздушной среды).Приборная (индикаторная)
 - это истинная скорость полета, приведенная
к нормальной плотности воздуха.
- это истинная скорость полета, приведенная
к нормальной плотности воздуха.Относительная (число М)
 .
.Вертикальная
 - это скорость движения самолета в
вертикальной плоскости.
- это скорость движения самолета в
вертикальной плоскости.Путевая
 - это скорость движения самолета
относительно земной поверхности в
горизонтальной плоскости.
- это скорость движения самолета
относительно земной поверхности в
горизонтальной плоскости.
Для измерения скоростей полета используются методы:
истинной
 ,
приборной
,
приборной ,
относительной (числа М), вертикальной
,
относительной (числа М), вертикальной -манометрический;
-манометрический;путевой
 -радиотехнический.
-радиотехнический.
4.3.2 Методы определения скоростей полета
Манометрический– измерение динамического давления заторможенного потока воздуха.
Анемометрический– измерение скорости вращения вертушки, помещенной в набегающий поток воздуха.
Термоанемометрический– измерение температуры токопроводящей нити, помещенной в набегающий поток воздуха.
Компенсации динамического давления– осуществляется с помощью насоса, создающего противодействие.
Радиотехнический– основанный на эффекте Доплера;
Инерциальный – основанный на измерении ускорений.