

31. Паралельний аналого-цифровий пристрій (ацп) (рис. 5.8)
За способом перетворення вибіркових значень сигналу в цифровий еквівалент АЦП зведені в три класи: послідовні; паралельні і послідовно-паралельні.
Принцип дії паралельних АЦП заснований на одночасному квантуванні сигналу за допомогою набору компараторів. Число компараторів рівне 2m – 1, де m - число розрядів, а порогові рівні встановлюються за допомогою резістівного дільника, підключеного до джерела опорної напруги, відповідно до використовуваної шкали квантування.
Структурна схема трьохрозрядного паралельного АЦП представлена на рис.5.8. При подачі вхідного сигналу спрацьовують всі ті компаратори, у яких поріг менше, ніж вхідний сигнал. Унітарний код, що виходить при цьому, за допомогою кодуючої логіки перетвориться в двійковий.
Головною гідністю паралельних АЦП є їх висока швидкодія. Частота перетворення досягає 100-200 Мгц. Проте їх об'єм приблизно подвоюється з кожним новим розрядом. Тому розрядність таких АЦП не перевищує 10-12.
32. Логічний виявляч радіолокаційних сигналів (рис. 5.11)
Алгоритм оптимального виявлення пачки бінарно-квантованих сигналів представляється у вигляді
![]()
де xi - значення сигналу (0 або 1) на i-ой позиції пачки; ni - ваговий коефіцієнт, залежний від значень вірогідності отримання нулів і одиниць на i-ій позиції пачки; М - число імпульсів в пачці (число позицій).
Послідовність коефіцієнтів ni називають ваговою функцією виявлення.
З формули видно, що виявлення пачки зводиться до підсумовування значень вагової функції на тих позиціях, де xi = 1, і порівнянню результату підсумовування з порогом С, при перевищенні якого видається рішення про виявлення. У зв'язку з цим пристрій, що реалізовує алгоритм, називають ваговим бінарним виявлячем.
Логічний виявляч k з М. Виявляч, який по своїй ефективності еквівалентний виявлячу рухомого вікна, може бути виконаний на основі логічних схем (рис.5.11). Принцип його дії заснований на тому, що рішення про виявлення або невиявлення пачки ухвалюється на основі аналізу вмісту регістра логічною схемою. Число розрядів регістра рівне числу імпульсів в пачці - М, тобто аналізу піддається послідовність нулів і одиниць в межах ширини діаграми спрямованості антени РЛС.
Конкретний вид логічної схеми може бути синтезований методами булевої алгебри з урахуванням забезпечення заданої вірогідності правильного виявлення Робн і помилкової тривоги Рлт. Останні залежать від того, по якій кількості комбінацій нулів і одиниць в регістрі (із загальної кількості, рівної 2М) приймаєтся рішення про виявлення пачки. Очевидно, чим більше таких комбінацій, тим більше вірогідність правильного виявлення, але більше і вірогідність помилкової тривоги.
33. Цифровий вимірювач дальності цілей (рис. 5.20)
Методи цифрового вимірювання дальності.
У цифрових вимірювачах дальності час запізнювання відображеного сигналу, а відповідно і дальність до цілі, визначається шляхом рахунку Nм = 2rFм/c масштабних імпульсів Uм, що мають достатньо високу і стабільну частоту повторення Fм і укладену на інтервалі часу від моменту tо випромінювання зондуючого імпульсу до моменту приходу відображеного сигналу (рис.5.19).
Кожен імпульс синхронізатора відмикає лічильник імпульсів, а наступний за ним відображений сигнал припиняє рахунок. До моменту випромінювання чергового імпульсу передавача дані лічильника вводяться в систему пам'яті вимірника і лічильник повертається в початковий стан, тобто дозволяє почати новий цикл рахунку.
Дискретність відліку дальності складає Δr = c/(2Fм), а число розрядів лічильника n визначається виходячи з максимуму дальності і допустимої помилки
2n ≥ rmax/Δr
Приклад. При rmax = 200 км і Δr = 20 м величина rmax/Δr = 104, звідки n = 14.
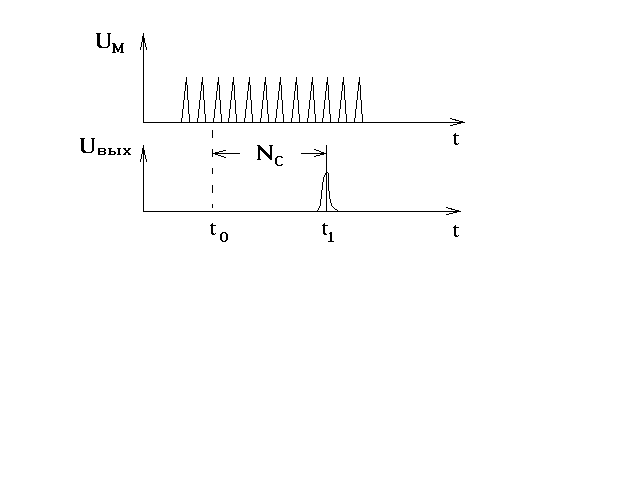
Рис.5.19. Масштабні мітки дальності
Пристрій, показаний на рис.5.20, дозволяє за період повторення зміряти дальність тільки до однієї цілі. Цей недолік можна усунути, якщо трігер закривати імпульсом кінця дистанції (ІКД), а у момент приходу імпульсу цілі, поточний код дальності записується в блок пам'яті спецобчислювача. При цьому процес рахунку не припиняється і з приходом іншого імпульсу цілі видається інше значення дальності.