

5. 7. 7. Симплексний метод
Основна ідея цього методу укладається в тому, що по відомим значенням цільової функції у вершинах опуклого многогранника, що називається симплексом, знаходиться напрямок, у якому вимагається зробити наступний крок, щоб одержати найбільше зменшення (збільшення) значення цільової функції. При цьому під симплексом в n-мірним просторі розуміється многогранник, що має n+1 вершину. Прикладом симплекса в двомірним просторі, т. є. на площині, є трикутник. В трьохмірним просторі - тетраедр. Симплекс володіє наступною властивістю - проти будь-який з його вершин Sj розміщена тільки одна грань, на якої можна збудувати новий симплекс, що відрізняється від колишнього розміщенням нової вершини Sj тоді як інші вершини обох симплексів співпадають. Вершина нового симплекса S, взагалі кажучи, може знаходитися і по іншу сторону грані від вершини Sj.
Ця властивість симплекса і обумовлювала можливість його застосування при рішенні задач оптимiзації.
Розглянемо найпростіший випадок - пошук мінімуму цільової функції двох перемінних R(U1 ,U2 ).
Алгоритм пошуку наступний:
1. Розраховуються значення цільової функції у вершинах обраного вами симплексаS10, S20, S30 (рис.5.27).
2.Вибирається вершина, де значенняR(U1 ,U2)найбільше -S10.
3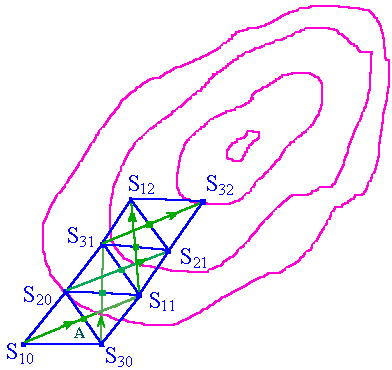 .Новий симплексS11 ,S20
,S30 будується таким засібом:
- знаходиться середина граніS20
,S30 , яка розташована
проти вершиниS10
- крапка А. Через крапкиS10іАпроводиться пряма. На цій прямій
від крапкиАвідкладається відрізокАS11, рівний по величині
відрізку S10 А.
.Новий симплексS11 ,S20
,S30 будується таким засібом:
- знаходиться середина граніS20
,S30 , яка розташована
проти вершиниS10
- крапка А. Через крапкиS10іАпроводиться пряма. На цій прямій
від крапкиАвідкладається відрізокАS11, рівний по величині
відрізку S10 А.
4.У новій вершині обчислюється значення цільової функції.
5. З вершин нового симплексаS11, S20, S30вибирається та, де значення цільової функції максимально.Рис.5.27
6.Аналогічноп.3будується новий симплексS11, S20, S31, тобто
виключається вершина S30, що мала найбільше значення цільової функції і т.д.
У результаті застосування розглянутої процедури виключення вершин симплексів з найбільшим значенням цільової функції процес пошуку сходиться до мінімального значення R(U1 ,U2 ). При виникненні зациклення в околицях крапки екстремуму необхідно зменшувати розміри симплекса.
Критерієм закінчення пошуку можуть служити розміри симплекса. Наприклад, якщо всі ребра симплекса стануть менше δ, те пошук можна припиняти.
Розглянемо алгоритм симплексного методу для задач довільної розмірності.
Нехай вершинам вихідного симплекса Si (i=1,2,...,n+1)відповідають координати
U(i)=(U(i)1 ,U(i)2 ,..., U(i)n), (i=1,2,...,n+1). І нехай найбільше значення цільової функції відповідає вершиніSj. Визначимо координати вершиниŜjнового симплекса.
Вершина Ŝjрозташовується симетрично вершиніSj щодо середини грані, що знаходиться проти вершиниSj. Координати центра цієї граніU(i)визначаються по формулі: (5.62) причому підсумовування ведеться тільки по тим векторамU(i), що відповідають вершинамSi, що утворюють цю грань. Вектор, що характеризує відстань від вершиниSjдо центра грані, яка розташована проти цієї вершини, буде:
|
|
(5.63) |
Координати вершини Sjвизначаються по формулі
|
|
(5.64) |
Підставивши в (5.64) вираження для Uз (5.62), одержимо:
|
|
(5.65) |
Формула (5.65)визначає координати вершиниSjнового симплекса.
При необхідності зменшити розміри симплекса (у випадку зациклення в околиці крапки оптимуму) замість формули (5.63)можна користатися наступним вираженням:
|
|
(5.66) |

Найбільше ефективно симплексний метод сходиться при використанні правильних симплексів - рівностороннього чи трикутника тетраедра, утвореного рівносторонніми трикутниками. У цьому випадку напрямок пошуку збігається з напрямком градієнта (якщо симплекс досить малий).
Симплексний метод володіє ще одним важливим достоїнством- при збільшенні розмірності задачі обчислювальні витрати зростають незначно, тому що на кожнім кроці вважається тільки одне значення цільової функції.