

3.3. Колебательное движение

Рассмотрим динамику
колебательного движения на примере
колебания груза массой m,
подвешенного к пружине (рис 3.5). В состоянии
равновесия, сила тяжести груза
![]() уравновешивается силой упругости
пружины
уравновешивается силой упругости
пружины![]()
![]() ,
,
F
х
г
х
Выведем груз из
положения равновесия и дадим ему
возможность двигаться вдоль оси Х. Под
действием сил тяжести
![]() и упругости
и упругости
![]() груз будет совершать движение с ускорением
а
согласно уравнениям:
груз будет совершать движение с ускорением
а
согласно уравнениям:
![]() (3.12)
(3.12)
Введём обозначение
![]() ,
тогда
,
тогда
![]() .
(3.13)
.
(3.13)
Равенство (3.13) называется дифференциальным уравнением свободных колебаний. Координата смещения груза относительно его положения равновесия, определяется из уравнения (3.13) и равна
![]() (3.14)
(3.14)
где А – амплитуда (максимального смещения груза от положения равновесия),
![]() -
циклическая частота,
-
циклическая частота,
![]() - фаза колебания,
- фаза колебания,![]() - начальная фаза колебания.
- начальная фаза колебания.
Период колебания
![]() (3.15)
(3.15)
частота
![]() .
(3.16)
.
(3.16)
3.3.1 Затухающие колебания
Если груз колеблется в среде, то он испытывает ее сопротивление.
При малых смещениях груза от положения равновесия сила сопротивления
![]() ,
(3.17)
,
(3.17)
где
r![]() – коэффициент сопротивления.
– коэффициент сопротивления.
С учетом силы сопротивления дифференциальное уравнение движения груза имеет вид
![]() .
(3.18)
.
(3.18)
Разделим обе части
уравнения (3.18) на m,
перенесем все слагаемые в левую часть
и введем обозначения
![]() ,
,![]() ,
тогда
,
тогда
![]() (3.19)
(3.19)
где
![]()
![]() - коэффициент затухания.
- коэффициент затухания.
В результате решения дифференциального уравнения (3.19) координата смещения груза
![]() (3.20)
(3.20)
где
![]() и
и![]() - амплитуда колебаний и фаза в момент
времениt=0,
- амплитуда колебаний и фаза в момент
времениt=0,
![]() - циклическая
частота затухающих колебаний (рис 3.7).
- циклическая
частота затухающих колебаний (рис 3.7).
Затухающие колебания не являются гармоническими, так как амплитуда этих колебаний убывает по экспоненциальному закону
![]()
![]() .
(3.21)
.
(3.21)
Ц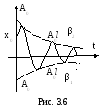 иклическая
частота ω и период Т затухающих колебаний
определяются из соотношений:
иклическая
частота ω и период Т затухающих колебаний
определяются из соотношений:
![]() ,
(3.22)
,
(3.22)
![]() (3.23)
(3.23)
где ω0 частота свободных колебаний тела.
Период определённый из последнего соотношения называется условным периодом затухающих колебаний.
Условный период затухающих колебаний – наименьший промежуток времени Т, за который груз дважды проходит через положение равновесия, двигаясь в одном и том же направлении.
Период затухающих колебаний больше периода свободных колебаний.
Отношение двух
амплитуд затухающих колебаний в моменты
времени t
и
![]()
 (3.24)
(3.24)
называется декрементом затухания. Натуральный логарифм этого отношения называется логарифмическим декрементом
 (3.25)
(3.25)
Логарифмический декремент затухания характеризует затухание колебаний за период, а коэффициент затухания за единицу времени.
Время, в течение которого амплитуда колебаний уменьшается в е раз называется временем релаксации τ.
 ,
,
![]()
![]() (3.26)
(3.26)
Коэффициент затухания – это величина, обратная времени релаксации и определяет число колебаний за единицу времени.
За время τ система
совершит
![]() колебаний.
колебаний.
Логарифмический декремент затухания равен обратному числу колебаний, совершаемых системой за время релаксации.
![]() (3.27)
(3.27)
3.3.2. Вынужденные колебания и резонанс
Если на груз, кроме упругой силы и силы сопротивления, будет действовать внешняя периодическая сила, то он будет совершать вынужденные колебания.
При внешней силе
![]() дифференциальное
уравнение вынужденных колебаний имеет
вид
дифференциальное
уравнение вынужденных колебаний имеет
вид
![]() ,
(3.28)
,
(3.28)
где
![]() - коэффициент затухания;
- коэффициент затухания;![]() - максимальное значение силы;
- максимальное значение силы;
![]() - частота изменения
силы.
- частота изменения
силы.
![]() - циклическая
частота свободных колебаний;
- циклическая
частота свободных колебаний;
![]() - сила, действующая
на единицу массы груза.
- сила, действующая
на единицу массы груза.
В результате решения дифференциального уравнения (3.28) координаты смещения груза х = х1 + х2,
где
![]() - соответствует затухающему колебанию,
- соответствует затухающему колебанию,
![]() - вынужденному.
- вынужденному.
Затухающие колебания происходят в начальный момент времени и их амплитуда уменьшается с течением времени.
Поэтому в
результате действия внешней периодической
силы
![]() долгое время совершаются колебания
долгое время совершаются колебания
![]() (3.29)
(3.29)
где
 ,
(3.30)
,
(3.30)
![]() (3.31)
(3.31)
Амплитуда колебаний зависит от частот внешней силы Ω и свободных колебаний ω0.
Для Ω << ω0,
![]() ,
(3.32)
,
(3.32)
Ω >> ω0,
![]() ,
(3.33)
,
(3.33)
![]()
 .
.
Для частоты внешней силы
β3![]() (3.34)
(3.34)
наступает резонанс, когда амплитуда максимальна и зависит от коэффициента затухания и частоты свободных колебаний
![]() (3.35)
(3.35)
Д ля
самостоятельного изучения
ля
самостоятельного изучения
3.3.3 Колебания математического маятника
Математический
маятник представляет собой материальную
точку, подвешенную на невесомой и
нерастяжимой нити, например, небольшой
шарик, подвешенный на тонкой длинной
нити (рис. 3.8). Отклонение маятника от
положения равновесия определяется
углом
![]() .
При отклонении маятника от положения
равновесия действует момент силы
.
При отклонении маятника от положения
равновесия действует момент силы![]() ,
модуль которого равен
,
модуль которого равен![]() ,
где
,
где![]() - масса шарика;
- масса шарика;
![]() - длина нити.
Направление момента силы таково, что
он стремится вернуть маятник в положение
равновесия, т.е. по своему действию
момент
- длина нити.
Направление момента силы таково, что
он стремится вернуть маятник в положение
равновесия, т.е. по своему действию
момент
![]() аналогичен упругой силе. Поэтому по
аналогии с колебанием груза на пружине
противоположный знак следует приписать
угловому смещению
аналогичен упругой силе. Поэтому по
аналогии с колебанием груза на пружине
противоположный знак следует приписать
угловому смещению![]() .
.
Тогда вращательный
момент
![]() .
.
Вращательный
момент, действующий на маятник, сообщит
маятнику угловое ускорение
![]() .
Уравнение движения маятника
.
Уравнение движения маятника
![]() (3.36)
(3.36)
![]()
где
J=ml2,
![]()
Для
малых колебаний
![]() =
=![]()
![]() (3.37)
(3.37)
![]()
Обозначим
![]() и запишем уравнение колебания
математического маятника
и запишем уравнение колебания
математического маятника
![]() (3.38)
(3.38)
Результат решения уравнения (3.38) аналогичен уравнению (3.14) для колебания груза на пружине:
![]() (3.39)
(3.39)
Период и частота колебаний математического маятника
![]() ,
(3.40)
,
(3.40)
![]() (3.41)
(3.41)
Ф изический
маятник
изический
маятник
Физический маятник состоит из твёрдого тела, совершающего малые колебания.
При отклонении тела от положения равновесия возникает момент силы тяжести М=mglsinα, где l – расстояние между точкой подвеса О и центром инерции С (рис.3.9).
Уравнения колебаний физического маятника:
 (3.42)
(3.42)
где
![]() ,J-
момент инерции тела относительно оси,
проходящей через точку подвеса О.
,J-
момент инерции тела относительно оси,
проходящей через точку подвеса О.
Период колебаний
физического маятника:![]()
![]() (3.43)
(3.43)
Из сравнения формул (3.43) и (3.40) следует,
что математический маятник с приведённой
длиной
![]() и с подвесом в точке О будет иметь такой
же период колебаний, как и физический.
и с подвесом в точке О будет иметь такой
же период колебаний, как и физический.
Задания для самоконтроля знаний.
Определить период и частоту колебаний пружинного маятника с коэффициентом упругости пружины 100
 и массой груза 10 кг.
и массой груза 10 кг.Определить максимальную скорость колебаний пружинного маятника с параметрами k=200
 ,m=5 кг, если максимальное
смещение от положения равновесия груза
равно 5 см.
,m=5 кг, если максимальное
смещение от положения равновесия груза
равно 5 см.Определить период затухающих колебаний, если частота свободных колебаний 1 Гц, а коэффициент затухания 2 с-1.
Определить время релаксации затухающих колебаний с коэффициентом затухания 2 с-1.
Определить резонансную частоту колебаний пружинного маятника с коэффициентом упругости 100
 ,
массой груза 10 кг и коэффициентом
затухания 2 с-1.
,
массой груза 10 кг и коэффициентом
затухания 2 с-1.
Лекция 10