

5.3.2. Физический маятник
Физическим маятником называется любое твердое тело, способное под действием силы тяжести совершать колебания вокруг неподвижной оси, не совпадающей с его центром инерции (рис. 5.4). По аналогии с уравнением для математического маятника запишем уравнение для физического маятника:
![]() =
mgl sin
, (5.24)
=
mgl sin
, (5.24)
г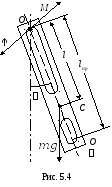 деm
– масса маятника; l
– расстояние между точкой подвеса О
и центром инерции С
маятника (рис. 5.4). Знак минус в выражение
(5.24) имеет то же значение, что и в формуле
(5.16).
деm
– масса маятника; l
– расстояние между точкой подвеса О
и центром инерции С
маятника (рис. 5.4). Знак минус в выражение
(5.24) имеет то же значение, что и в формуле
(5.16).
В случае малых колебаний выражение (5.24) переходит в уже известное нам уравнение
![]() .
(5.25)
.
(5.25)
В данном случае
![]() .
(5.26)
.
(5.26)
Момент инерции физического маятника относительно оси, проходящей через точку подвеса, можно представить в виде:
![]() .
(5.27)
.
(5.27)
Выражение (5.25) представляет собой дифференциальное уравнение колебаний физического маятника. Решение уравнения (5.25) имеет вид:
= 0 cos (0 t +) . (5.28)
Из уравнения (5.28) следует, что при малых отклонениях от положения равновесия физический маятник совершает гармонические колебания, частота которых зависит от массы маятника, момента инерции маятника относительно оси вращения и расстояния между осью вращения и центром инерции маятника. В соответствии с (5.26) период колебания физического маятника определяется выражением
![]() .
(5.29)
.
(5.29)
Приведенной длиной физического маятника называется длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника. Из сопоставления формул (5.23) и (5.29) следует, что приведенной длиной физического маятника будет выражение
![]() .
(5.30)
.
(5.30)
Точка на прямой, соединяющей точку подвеса с центром инерции, лежащая на расстоянии приведенной длины от оси вращения, называется центром качания физического маятника (см. точку О на рис. 5.4).
Точка подвеса и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится новым центром качания.
5.4. Сложение гармонических колебаний
В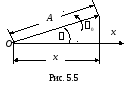 екторное
изображение колебаний облегчает и
делает более наглядным решение ряда
практически важных задач, в частности
сложение нескольких колебаний одинаковой
частоты.Если
изображать колебания графически с
помощью векторов, вращающихся с угловой
скоростью 0,
равной
собственной частоте колебания, то
полученная таким способом схема,
называется векторной диаграммой.
екторное
изображение колебаний облегчает и
делает более наглядным решение ряда
практически важных задач, в частности
сложение нескольких колебаний одинаковой
частоты.Если
изображать колебания графически с
помощью векторов, вращающихся с угловой
скоростью 0,
равной
собственной частоте колебания, то
полученная таким способом схема,
называется векторной диаграммой.
Возьмем ось, которую обозначим буквой х (рис. 5.5). Из точки О, взятой на оси, отложим вектор длины А, образующий с осью угол . Если привести этот вектор во вращение с угловой скоростью 0, то проекция конца вектора будет перемещаться по оси х в пределах от А до +А, причем координата этой проекции будет изменяться со временем по закону:
х =А cos (0 t +).
Следовательно, проекция конца вектора на ось будет совершать гармоническое колебание, амплитуда которого равна длине вектора, круговая частота угловой скорости вращения вектора, а начальная фазауглу, образуемому вектором с осью в начальный момент времени.
На практике часто приходится иметь дело с таким движением, при котором тело участвует одновременно в двух или нескольких колебаниях. Например, если груз подвешен на пружине к потолку вагона, то груз совершает колебания относительно точки подвеса, которая, в свою очередь, колеблется на рессорах вагона. Таким образом, груз совершает движение, складывающееся из двух колебаний одного направления.
Примером сложения колебаний различного направления является движение пучка электронов в электронно-лучевой трубке под действием двух взаимно перпендикулярных электрических полей.
Рассмотрим два наиболее простых случая сложения гармонических колебаний.