

3.3 Экспериментальные исследования алгоритма |
|
управления |
93 |
4
3,5 |
|
|
|
ωˆ1 |
|
|
|
|
|
ωˆ2 |
|
3 |
|
|
|
|
|
2,3 |
|
|
|
|
|
2 |
|
|
|
|
|
1,5 |
|
|
|
|
|
1 |
|
|
|
|
|
0,5 |
|
|
|
|
|
0 |
|
|
|
t, c |
|
50 |
100 |
150 |
200 |
||
0 |
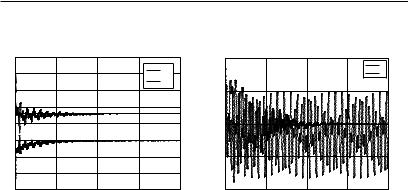
(а) Временная диаграмма оценки частот ^ ( )
1
a b
0,5
0
−0,5
t, c
−1
0 |
50 |
100 |
150 |
200 |
(б) Временная диаграмма выходной переменной ( ) без управления (a) и
с управлением (b)
Рис. 3.6. Временные диаграммы оценки частот возмущения 1 =
1, 5, 2 = 2, 3 и выходной переменной ( ) при запаздывании = 4, нелинейной функции ( ) = − 3 − sin( ) и коэффициентах
идентификатора = 2, 1 = 20, 2 = 20
3.3Экспериментальные исследования алгоритма управления
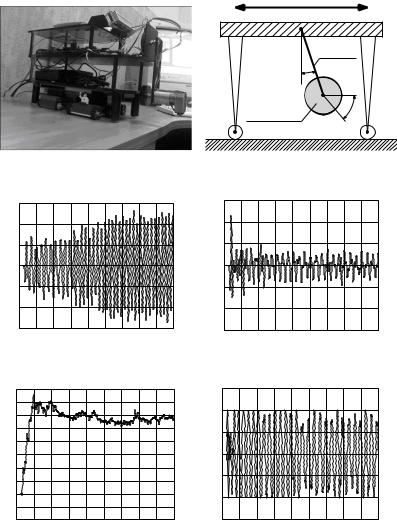
Для иллюстрации работоспособности рассмотренного алгоритма управления представлены результаты экспериментального исследования разработанного алгоритма на примере мехатронного маятникового комплеса на базе Mechatronic Control Kit (MCK) фирмы Mechatronic Systems [81].
Описание схемы эксперимента, анализ математической модели маятниковой установки с реакционным колесом, описание реализации алгоритма управления представлены в ряде публикаций [1,16,27,44,48,50,66,91,93].
Для исследования работы алгоритма в условиях запаздывания программно создается буфер в оперативной памяти контроллера MСK, через который пропускается функция управления. Величина имитируемого запаздывания определяется размером буфера.
Для исследования алгоритма управления в условиях действия возмущающего воздействия близкого по природе к реальному ис-

94 Глава 3. Устойчивые объекты с запаздыванием
пользуется тележка на подвижной основе (рис. 3.7а), на которой смонтирован маятник. Ко всей конструкции, свободно перемещаемой в горизонтальной плоскости, прикладывается возмущающее воздействие, создаваемое рукой и имитирующее нерегулярную качку (рис. 3.7б). Рассматривается задача стабилизации нижнего положения равновесия маятника, возмущенного внешним неизмеряемым воздействием при условии запаздывания в канале управления.
На рис. 3.7в–3.7е представлены результаты эксперимента для запаздывания = 1, параметров алгоритма управления = 10,
= 5. Выходная переменная не стремится к нулю, но находится
в малой окрестности. Это вызвано неточным заданием параметров объекта управления, которые необходимы при формировании закона управления.
3.4Заключительные выводы по главе
1.Рассмотрен алгоритм синтеза адаптивного наблюдателя мультигармонического возмущающего воздействия, включая идентификацию всех частот, для устойчивого линейного объекта управления.
2.Описан алгоритм адаптивной компенсации мультигармонического возмущающего воздействия для линейного объекта с запаздыванием в канале управления.
3.Результаты для линейных объектов обобщены на класс нелинейных систем с запаздыванием в канале управления: приведены алгоритм построения адаптивного наблюдателя возмущения и алгоритм компенсации параметрически не определенного возмущающего воздействия.
4.Рассмотрены числовые примеры моделирования алгоритмов управления. Приведены результаты экспериментальных исследований описанных алгоритмов на мехатронном маятниковом комплексе.
3.4 Заключительные выводы по главе |
95 |
|
|
Возмущение
|
Маятник |
θ |
mp, Jp |
Реактивное |
θr |
|
|
колесо mr, Jr |
|
(а) Мехатронный маятниковый ком- (б) Маятник на подвижной платформе плекс
Y (t) |
|
|
|
|
|
|
|
|
|
Y (t) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,4 |
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,2 |
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
−0,2 |
|
|
|
|
|
|
|
|
|
−0,2 |
|
|
|
|
|
|
|
|
|
|
|
−0,4 |
|
|
|
|
|
|
|
|
|
−0,4 |
|
|
|
|
|
|
|
|
|
|
|
−0,6 |
|
|
|
|
|
|
|
|
t, c |
−0,6 |
|
|
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
||
|
|||||||||||||||||||||
(в) |
Выходная |
перемнная |
( ) без (г) |
Выходная перемнная ( ) с управ- |
|||||||||||||||||
управления |
|
|
|
|
|
|
|
лением |
|
|
|
|
|
|
|
|
|
||||
ωˆ |
|
|
|
|
|
|
|
|
|
U(t) |
|
|
|
|
|
|
|
|
|
|
|
4,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3,5 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,5 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
0,5 |
|
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
|
|
|
|
|
t, c |
|
0 |
|
|
|
|
|
|
|
|
−15 |
|
|
|
|
|
|
|
|
|
|||
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
|||
0 |
0 |
||||||||||||||||||||
|
(д) |
Оценка частоты ^( ) |
|
|
|
|
(е) |
Управление ( ) |
|
|
|||||||||||
Рис. 3.7. Результаты экспериментальных исследований