

Глава 1
Обзор методов управления в условиях запаздывания и возмущений. Постановка задачи
В главе представлен обзор методов управления в условиях запаздывания и неизмеряемых возмущающих воздействий. Рассмотрен сравнительный анализ существующих методов управления в условиях запаздывания и в условиях возмущающих воздействий. Выделены достоинства и недостатки известных подходов. Затем сформулирована обобщенная постановка задачи, решению которой посвящены следующие главы пособия.
1.1Обзор методов управления в условиях запаздывания
В теории автоматического управления особое место занимают системы с запаздыванием, задача управления которыми всегда привлекала внимание многих исследователей [8,10–14,17,18,23–27,29– 36, 40, 51, 53–58, 62–64, 67, 68, 70–73, 78–80, 82–84, 88–91, 93–95, 97–99]. Выделение объектов с запаздыванием в отдельный класс вызвано, прежде всего, большой сложностью их исследования по сравнению с объектами, не содержащих временного запаздывания. Характерной особенностью систем управления для объектов с запаздыванием является зависимость состояния управляемого процесса от предыстории, и пренебрежение влиянием запаздывания приводит
1.1. Методы управления в условиях запаздывания |
15 |
|
|
к ухудшению качества функционирования системы, а иногда и к потере устойчивости.
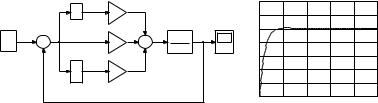
Рассмотрим простейший объект управления, описываемый апериодическим звеном первого порядка, и пропорционально- интегрально-дифференциальный закон управления. Показатели качества определяются коэффициентами регулятора , и
(Рис. 1.1).
|
|
|
|
|
|
1,4 |
|
|
|
|
|
|
s |
1 |
|
|
|
1,2 |
|
|
|
|
|
|
Производная |
kd |
|
|
|
1 |
|
|
|
|
|
1 |
+ |
5 |
+ |
1 |
|
|
|
|
|
|
|
+ |
|
0,8 |
|
|
|
|
|
||||
– |
+ |
s+1 |
|
|
|
|
|
|
|
||
Задающее |
|
kp |
|
Выход |
0,6 |
|
|
|
|
|
|
|
|
|
Объект |
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|||
воздействие |
3 |
|
управления |
|
0,4 |
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
ki |
|
|
|
0,2 |
|
|
|
|
|
|
|
Интегратор |
|
|
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
|
0 |
2 |
4 |
6 |
8 |
10 |
|
|
|
|
|
|
0 |
|||||
(а) Структурная схема замкнутой системы |
(б) |
Временная |
|
диаграмма |
|||||||
|
|
|
|
|
|
выходной переменной |
|
||||
Рис. 1.1. Система управления с ПИД-регулятором
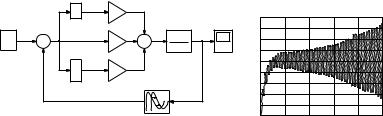
Если канал измерения характеризуется запаздыванием, то становится затруднительным обеспечение требуемых показателей качества с помощью того же регулятора (Рис. 1.2). При некотором критическом значении запаздывания система управления потеряет устойчивость. Это объясняется тем, что звено запаздывания вносит отрицательный сдвиг фазы в систему.
Пропорционально-интегрально-дифференциальный алгоритм управления является достаточно популярным как в теории, так и в практике, в силу простоты реализации и анализа. Однако, как показано на рис. 1.1, 1.2 наличие очень маленького запаздывания делает систему неустойчивой. В этом случае задача настройки параметров регулятора представляется очень сложной, а может и вовсе неразрешимой, если сигнал управления ограничен по модулю. В связи с этим задачи управления в условиях запаздывания — это особый класс задач, требующий специального рассмотрения, разработки новых методов управления, ориентированных на возможное временное запаздывание в канальной среде.
В статье [26] рассматривается линейный стационарный объект
16 |
Глава 1. Обзор методов. Постановка задачи |
|
|
|
s |
1 |
|
|
|
1,8 |
|
|
|
|
|
|
|
kd |
|
|
|
|
|
|
|
|
|
|
Производная |
|
|
|
1,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
+ |
5 |
+ |
1 |
|
1,4 |
|
|
|
|
|
+ |
|
|
|
|
|
|
|||||
– |
+ |
s+1 |
|
|
|
|
|
|
|
||
Задающее |
|
kp |
|
Выход |
1,2 |
|
|
|
|
|
|
1 |
|
|
Объект |
1 |
|
|
|
|
|
||
воздействие |
3 |
|
управления |
|
0,8 |
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
||
|
ki |
|
|
|
0,6 |
|
|
|
|
|
|
|
Интегратор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4 |
|
|
|
|
|
|
|
|
|
|
|
0,2 |
|
|
|
|
t, c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запаздывание |
|
0 |
2 |
4 |
6 |
8 |
10 |
|
|
|
|
|
0 |
|||||||
(а) Запаздывание в канале измерения |
|
(б) Неустойчивый процесс |
|||||||||
Рис. 1.2. Потеря устойчивости системы управления из-за запаздывания = 0, 1 секунд
управления с неизвестными параметрами, характеризуемый переменным запаздыванием в каналах управления и измерения. В работе был получен адаптивный предиктор, дающий упредительные оценки выходной переменной и переменных состояния. Недостатками этой работы является допущение о полной измеримости вектора состояния, что на практике встречается довольно редко, и отсутствие в рассмотрении действия возмущающих воздействий.
Встатье [51] рассматривается нелинейный объект управления при наличии запаздывания по состоянию. Задача решена методом профессора Бобцова “последовательный компенсатор”. Данный метод также позволяет решать задачи слежения в условиях параметрической и функциональной неопределенности [39], неучтенной паразитной динамики, внешних возмущающих воздействий. Данный метод был успешно применен в задаче стабилизации хаотической системы Ван-Дер-Поля [46]. В качестве недостатка этого подхода отметим отсутствие в рассмотрении запаздывания в канале управления или измерения.
Встатье [57] решается задача стабилизации линейного объекта управления с запаздыванием по управлению. Группа ученных профессора Цыкунова А.М. получила достаточно много серьезных теоретических результатов для систем с входным запаздыванием,
идаже для параметрически не определенных объектов [30–33]. Однако в этих работах не рассматриваются возмущения.

1.1. Методы управления в условиях запаздывания |
17 |
|
|
1.1.1Предиктор Смита
Стабилизация линейных систем с запаздыванием в канале управления продолжает быть областью активных исследований. Различные схемы управления объектами с запаздыванием на входе предложены многими авторами, отправной точкой во многих из них является предиктор Смита [95], специальная структура регулятора, предложенная Смиттом в 1957 году.
Цель предиктора Смита — предсказать, какой сигнал должен появиться на выходе до того, как он там появится на самом деле. Для предсказания можно использовать модель объекта управления, состоящую из дробно-рациональной части 0( ) и транспорт- ной задержки − . Благодаря тому, что из модели можно исклю-
чить задержку, появляется принципиальная возможность предсказания поведения объекта до появления сигнала на его выходе. На рис. 1.3 представлена структурная схема замкнутой системы с предиктором Смита. Здесь — структура обычного ПИД-регулятора,
0( ) − — передаточная функция объекта управления.
r |
|
|
e |
|
|
|
|
|
u |
|
|
|
y |
||
+ |
|
+ |
|
|
R(s) |
P0(s)e−sh |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
– |
– |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ ε |
|||
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
M0(s) |
|
|
|
M0(s)e−sh |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.3. Система управления с предиктором Смита
Принцип работы системы состоит в следующем. Предположим, что модель абсолютно точна. Тогда разность сигналов на выходах модели и объекта будет равна нулю ( = 0). Но в таком случае
непосредственно из схемы на рис. 1.3 можно получить:
= 0 − ( |
1 + 0 ) = |
( |
1 +0 0 |
− ) . |
(1.1) |
||||
|
|
|
|
|
|
|
|
|
|
В этом выражении член |
( |
1+ 0 ) |
представляет собой передаточ- |
||||||
|
|
|
0 |
|
|
|
|
|
|
ную функцию системы без запаздывания. А это значит, что звено
18 |
Глава 1. Обзор методов. Постановка задачи |
|
|
с транспортной задержкой не входит в контур обратной связи и не влияет на устойчивость и быстродействие системы, то есть происходит регулирование в контуре с моделью без запаздывания, а транспортная задержка прибавляется к полученному результату.
Рассмотрим теперь работу предиктора Смита без предположения = 0. В этом случае схему на рис. 1.3 можно описать следую-
щими уравнениями:
= 0 − ( − − 0 ) , = − 0 − , = 0 − , |
(1.2) |
|||
откуда можно найти |
+ ( 0 − 0) − ] |
|
|
|
= [ |
1 + 0 |
− . |
(1.3) |
|
|
|
0 |
|
|
Как видим, с ростом точности модели разность 0 − 0 в зна-
менателе стремится к нулю, и из передаточной функции системы исключается запаздывание, которое только добавляется к результату регулирования (в квадратных скобках в (1.3)).
C помощью топологических преобразований структурных схем можно получить много эквивалентных между собой структур систем с предиктором Смита. Две из них представлены на рис. 1.4. Можно показать, что они описываются тем же уравнением (1.3).
Предиктивный пропорционально-интегральный регулятор (сокращенно ППИ-регулятор) является модификацией предиктора Смита, которая распространена в системах автоматического управления более широко, чем сам предиктор Смита. Один из вариантов ППИ-регулятора изображен на рисунке 1.5
Наиболее важные работы [40,55,63,71,73,83,88], основанные на предикторе Смита, используют конечномерные модели и структуры. На ряду с ними стоит выделить адаптивные версии линейных регуляторов, основанных на предикторе [54, 84], где адаптивный алгоритм управления разработан даже для неизвестного запаздывания [53]. Более того, существуют различные схемы построения регуляторов для нелинейных систем [61,62,64,67,78,80].