

92 Глава 3. Устойчивые объекты с запаздыванием
5 
|
|
|
|
ωˆ1 |
4 |
|
|
|
ωˆ2 |
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
t, c |
0 |
50 |
100 |
150 |
200 |
0 |
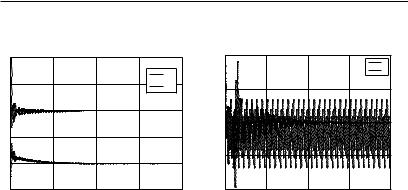
(а) Временная диаграмма оценки частот ^ ( )
1
a b
0,5
0
−0,5
t, c
−1
0 |
50 |
100 |
150 |
200 |
(б) Временная диаграмма выходной переменной ( ) без управления (a) и
с управлением (b)
Рис. 3.5. Временные диаграммы оценки частот возмущения 1 = 1,2 = 3 и выходной переменной ( ) при запаздывании = 10, нелинейной функции ( ) = −( + 1) sin( ) и коэффициентах иденти-
фикатора = 2, 1 = 20, 2 = 20
3.2.5Числовой пример
Для демонстрации эффективности предлагаемого алгоритма управления представим результаты математического моделирования нелинейного объекта (3.62)-(3.64) с параметрами
= |
−35 0 |
1 0 |
, = 0 |
, = 1 |
, = |
|
0 |
, 0 = 1 , |
|||||||||||||||||||||||
|
−10 |
1 |
|
0 |
0 |
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
−24 0 |
0 0 |
|
|
|
|
13 |
|
1 |
|
|
|
|
0 |
|
0 |
|||||||||||||||
|
|
0 |
|
0 |
1 |
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
50 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
0 |
|
|
|
1 |
|
|||||||
|
− |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
= |
, 1 |
= |
4 |
, 1 |
= |
6 , 2 |
= |
2 , 2 |
= 4 . |
|||||||||||||||||||||
|
|
|
5 |
|
|
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|||
|
|
|
4 |
|
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
2 |
|
|
5 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−1 |
|
||||||
|
|
|
10 |
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
3 |
|
|
|
|
|
||||||
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
||||||||
На рис. 3.6, 3.5 представлены результаты моделирования для различных частот возмущения, запаздывания и нелинейных функций ( ). Результаты моделирования демонстрируют эффектив-
ность алгоритма компенсации возмущающих воздействий для нелинейных объектов с запаздыванием в канале управления.