

3.4. Реакции опоры
Реакции опоры — это мера противодействия опоры при давлении на нее со стороны покоящегося или движущегося при контакте с ней тела. Реакция опоры равна по величине силе, с которой тело действует на опору, направлена в противоположную этой силе сторону и приложена к телу в той точке, через которую проходит линия силы, действующей на опору.
Нормальная (или идеальная) реакция опоры при действии веса тела на горизонтальную поверхность направлена вертикально вверх. Во всех случаях она перпендикулярна плоскости, касательной той поверхности, которая служит опорой в точке приложения силы.
Человек может оказывать действие на опору не только по нормали к ней, но и под острым углом. Тогда направление полной реакции опоры не совпадает с нормалью. Горизонтальная составляющая полной реакции опоры называется силой трения, если поверхности, соприкасающиеся при опоре, ровные (без выступов).
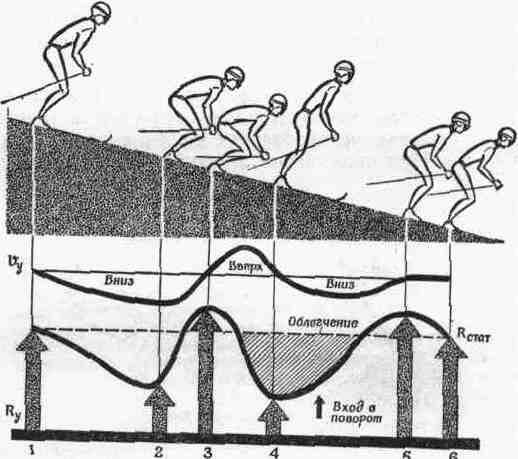
Рис. 32. Силы опорной реакции:
1, 6 — статические; 2, 4 — уменьшенные; 3, 5 — увеличенные (ориг.)
Человек, находящийся на опоре (нижней или верхней), действует на нее статическим весом. В этом случае реакция опоры статическая и равна весу тела (рис. 32). При движении с ускорением частей тела человека, опирающегося на опору, возникает сила инерции тела человека, которая геометрически суммируется с его весом. Увеличенную или уменьшенную опорную реакцию обычно называют динамической. Но правильнее говорить здесь о добавлении к статической еще и динамической составляющей опорной реакции, вызванной теми усилиями, которые определяют ускорение тела.
Линия действия силы опорной реакции при неподвижном положении тела на опоре или же под опорой проходит через ОЦТ тела человека. Однако при движениях человека линия действия как нормальной, так и полной опорной реакции (равнодействующая нормальной реакции и силы трения по всем направлениям) почти никогда не проходит через ОЦТ.
Для анализа действия сил на наклонной плоскости опорная реакция может быть разложена на нормальную составляющую (перпендикулярную плоскости) и касательную составляющую (параллельную плоскости). Первая противодействует нормальной составляющей силы тяжести, вторая (сила трения) — силе, вызывающей скольжение тела.
3.5. Силы трения
Сила трения — это мера противодействия движению, направленному по касательной к поверхности прикасающегося тела. Величина силы трения (как составляющей реакции поверхности связи) зависит от воздействия движущегося или смещаемого тела; она направлена против скорости или смещающей силы и приложена в месте соприкосновения.
Силы трения (касательные реакции) возникают между соприкасающимися телами во время их движения друг относительно друга (рис. 33)
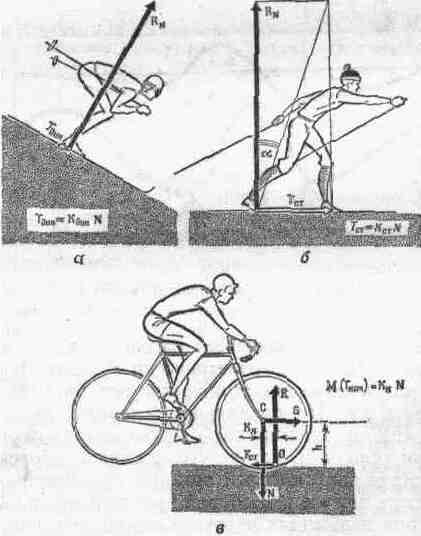
Рис. 33. Силы трения (Т):
a-скольжения динамическая; б — скольжения статическая; в — момент трения качения (ориг.)
Различают три вида трения: трение скольжения, качения и верчения. При скольжении движущееся тело соприкасается с неподвижным одной и той же частью своей поверхности (лыжа скользит по снегу). При качении точки движущегося тела соприкасаются с другим телом поочередно (колесо велосипеда катится по треку). Верчение характеризуется движением на месте вокруг оси (волчок).
Сила трения скольжения динамическая (движения) проявляется при движении тела, приложена к скользящему телу и направлена в сторону, противоположную относительной скорости его движения. Динамическая сила трения скольжения не зависит от величины движущей силы и приближенно пропорциональна динамическому коэффициенту трения скольжения (kдин) и силе нормального давления на опору (N): Tдин=kдинN
Когда поверхности полностью разделены слоем смазки, то проявляется жидкостное трение1 Оно существует между слоями жидкости, а также между жидкостью и твердым телом. В противоположность сухому трению (между твердыми телами без смазки), жидкостное трение проявляется только тогда, когда есть скорость. С остановкой движущихся тел жидкостное трение исчезает, поэтому даже самая малая сила может сообщить скорость слоям жидкой среды, например при движении твердого тела в воде.
Иная картина при сухом трении. Если приложить движущую силу к покоящемуся телу, то она сможет сдвинуть тело с места лишь тогда, когда станет больше силы трения покоя, препятствующей движению. Таким образом, сухое трение и жидкостное принципиально различны.
Сила трения скольжения статическая (покоя) проявляется в покое, приложена к сдвигаемому телу, направлена в сторону, противоположную сдвигающей силе. Статическая сила трения скольжения равна сдвигающей силе, но не может быть больше предельной2; последняя пропорциональна статическому коэффициенту трения скольжения (kст) и силе нормального давления (N): Тст=kстN
Стало быть, статическая сила трения покоя может иметь величину от нулевой до предельной (неполная и полная). Минимальная сдвигающая сила, приводящая тело в движение, больше предельной силы трения покоя.
Отношение между величиной нормальной опорной реакции (равной силе нормального давления) и предельной силой трения покоя равно тангенсу угла (а), который называется углом трения (или углом сцепления) (см. рис. 33, б).
Тангенс угла сцепления равен коэффициенту трения покоя. Фактический угол силы давления на опору в покое не может быть больше, чем угол трения. Это значит, что, пока линия действия силы, приложенной к телу, проходит внутри угла трения, тело не может быть сдвинуто с места. Лишь когда линия действия силы окажется за пределами угла трения, тело будет сдвинуто.
На горизонтальной поверхности сила нормального давления обычно представлена статическим или динамическим весом (человек неподвижен или отталкивается от опоры). Но могут быть и другие источники нормального давления, например при давлении, оказываемом ногами и спиной альпиниста на стенки камина (вертикальной расщелины в скалах),