


7
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ЗАДАЧИ ПРИ РАСТЯЖЕНИИ И СЖАТИИ
Задачи, в которых все реакции связей определяют из условия равновесия, называют статически определимыми. Если число неизвестных реакций связей превышает число уравнений равновесия, задача становится статически неопределимой. Степенью статической неопределимости называется разность между числом искомых неизвестных усилий и числом независимых уравнений равновесия, которые для данной системы можно составить. Все статически неопределимые конструкции имеют дополнительные, или так называемые «лишние», связи в виде закреплений, стержней либо других элементов. Лишними такие связи называют только потому, что они не являются необходимыми для обеспечения равновесия конструкции и ее геометрической неизменяемости, хотя постановка их диктуется условиями эксплуатации. По условиям прочности и жесткости конструкции лишние связи могут оказаться необходимыми. Для решения статически неопределимых задач к уравнениям равновесия добавляют условия совместной деформации, т.е. уравнения, связывающие между собой деформации или перемещения отдельных частей тела.
Решение статически неопределимых задач. Статически неопределимые конструкции, элементы которых работают на растяжение и сжатие, рассчитывают, решая совместно уравнения, полученные в результате рассмотрения статической, геометрической и физической сторон задачи. При этом придерживаются следующего порядка.
1.С т а т и ч е с к а я с т о р о н а з а д а ч и. Составляют уравнения равновесия отсеченных элементов конструкции, содержащие неизвестные усилия.
2.Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и. Рассматривая систему в деформированном состоянии, устанавливают связи между деформациями или перемещениями отдельных элементов конструкции. Полученные уравнения называют уравнениями совместности деформаций.
3.Ф и з и ч е с к а я с т о р о н а з а д а ч и. На основании закона Гука выражают перемещения или деформации элементов конструкции через действующие в них неизвестные усилия. В случае изменения температуры к деформациям, вызванным усилиями, добавляются температурные деформации.
4.С и н т е з. Решая совместно статические, геометрические и физические уравнения, находим неизвестные усилия.
123
7.1.СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
Условно задачи по раскрытию статической неопределимости стержневых систем при растяжении и сжатии можно подразделить на три типа:
—силовое воздействие на систему;
—температурные напряжения;
—монтажные напряжения.
Обычно на практике встречается совокупность воздействия всех перечисленных факторов.
Рассмотрим примеры расчета некоторых простейших статически неопределимых стержневых систем при различных воздействиях.
7.1.1.Силовое воздействие на статически неопределимую стержневую систему
Раскрытие статической неопределимости для такого типа задач покажем на примере.
Пример 7.1. К стержню, закрепленному обоими концами (рис. 7.1, а), приложены силы F и 2F. Построить эпюры продольных сил, напряжений и перемещений.
Р е ш е н и е. 1. С т а т и ч е с к а я с т о р о н а з а д а ч и. Поскольку силы F и 2F действуют вдоль оси стержня, то на его концах могут возникнуть только горизонтальные составляющие реакций в заделках (RA и RD). Направим их произвольно так, как показано на рис. 7.1, б.
Для системы сил, действующих по одной прямой линии, можно составить лишь одно уравнение равновесия
∑ FZ = RA + F + 2F − RD = 0. |
(7.1) |
Неизвестных два (RA и RD), а уравнение равновесия одно, следовательно, задача один раз статически неопределима.
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и. Так как концы стержня жестко закреплены, то его общая длина не изменяется. Следовательно, удлинение стержня равно нулю (DD = 0).
Заменяем заделку справа реакцией RD и решаем задачу как статически определимую (рис. 7.1, в). От действия сил F и 2F стержень
удлиняется, и сечение D перемещается вправо (∆FD , рис. 7.1, г). Но от действия реакции RD стержень сжимается, и сечение D перемещается
влево (∆RDD , рис. 7.1, д). В действительности сечение D не перемещается:
∆ |
D |
= ∆F |
+ ∆RD |
= 0. |
(7.2) |
|
D |
D |
|
|
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. В поперечных сечениях участка I действует продольная сила N1 = –RD; участка II — N2 =
124

= –RD + 2F; участка III — N3 = –RD+3F. Используя закон Гука, выразим деформации через эти усилия:
∆D = NEA1l + NEA2l + 2NEA3l .
Подставляя значения N1, N2 и N3, имеем
∆D |
= − |
5RDl |
+ |
7Fl |
. |
(7.3) |
2EA |
|
|||||
|
|
|
2EA |
|
||
2A |
A |
|
|
2A |
|
|
|
|
|
|
F |
2F |
RA |
|
|
|
|
||
l |
l |
l |
|
l |
A |
|
D |
|
A |
|
а |
|
|
|
2A |
A |
|
|
2A |
|
|
|
|
|
RA |
F |
RD |
|
|
|
2F |
|
|
|
l |
l |
l |
|
l |
A |
|
D |
|
A |
|
в |
|
|
|
|
|
2A |
A |
∆RDD |
|
|
|
|
|
|
|
|
|
RD |
|
l |
l |
|
l |
|
A |
|
|
D |
|
|
|
д |
|
|
A |
F |
RD |
2F |
ll
D
б
A∆FD
F2F
ll
D
г
Рис. 7.1. Раскрытие статической неопределимости стержневой системы, нагруженной силами:
а — схема нагружения; б — реакции опор; в — приведение стержня к схеме статически определимого; г — удлинение статически определимого стержня; д — сжатие стержня от действия реакции RD
125

4. С и н т е з. Решая совместно уравнения (7.2) и (7.3), получаем
RD = 75 F.
Таким образом, раскрыли статическую неопределимость. Задача стала статически определима (рис. 7.2, а).
5. Строим эпюру продольных сил:
|
|
|
|
N |
|
= −R |
|
|
|
= − |
7 |
F (сжатие); |
||||
|
|
|
|
1 |
|
|
|
|
||||||||
|
|
|
|
|
D |
5 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
N |
|
|
= −R |
+ 2F = − |
7 |
F + 2F = |
3 |
|
F (растяжение); |
|||||||
2 |
|
|
|
|
||||||||||||
|
D |
|
|
|
5 |
|
|
|
|
|
5 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
N |
|
= −R |
+ 3F = − |
7 |
F + 3F = |
|
8 |
F (растяжение). |
||||||||
3 |
|
|
|
|||||||||||||
|
|
D |
|
|
|
5 |
|
|
|
|
5 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Эпюра продольных сил показана на рис. 7.2, б.
6. Определяем напряжения на каждом из участков нагружения и строим их эпюру
σ1 = NA1 = − 75FA ; σ2 = NA2 = 35FA ; σ3 = 2NA3 = 45FA .
Эпюра напряжений представлена на рис. 7.2, в. 7. Строим эпюру перемещений.
Перемещение сечения А
∆ A = 0 (здесь заделка); перемещение сечения В
8
∆B = ∆ A + N3l = 0 + 5 Fl = 4 Fl ;
E2A E2A 5 EA
перемещение сечения С
|
|
|
|
|
|
|
|
3 |
Fl |
|
|
|
|
|
|
|
|
N2l |
|
4 |
|
Fl |
|
|
|
7 |
|
Fl |
|
||
∆C |
= ∆B + |
= |
|
+ |
5 |
= |
|
; |
|||||||
EA |
5 |
EA |
EA |
5 |
EA |
||||||||||
|
|
|
|
|
|
|
|
||||||||
перемещение сечения D
|
|
|
|
|
|
|
|
− |
7 |
Fl |
|
|
|
|
N1l |
|
7 |
|
Fl |
|
|
|
|||
∆D |
= ∆C + |
= |
|
+ |
5 |
= 0, |
||||||
EA |
5 |
EA |
EA |
|||||||||
|
|
|
|
|
|
|||||||
т.е. действительно перемещение сечения D равно нулю, т.к. там заделка.
126

III |
|
2A |
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
RD |
||||
а |
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
2F |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
III |
l |
|
B |
|
l II C |
|
|
|
|
l |
I |
D |
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
8 |
F |
|
Эпюра N |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
3 |
F |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
F |
|
|
|
|
|
|
|
|
|
|
|
Эпюра s |
|
|
|
|
5 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
III |
|
|
|
|
II |
|
|
|
|
|
|
I |
|
||||||||||
|
4 |
|
F |
3 |
|
|
|
F |
|
|
|
|
|
|
|
|
|
||||||||
5 |
|
A |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
5 |
|
|
A |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
A |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Эпюра D |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
Fl |
|
|
|
|
||||
|
4 |
|
Fl |
|
|
|
5 |
EA |
|
|
|
||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
5 |
EA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
г
Рис. 7.2. Построение эпюр продольных сил, напряжений и перемещений:
а— схема нагружения статически определимой стержневой системы;
б— эпюра продольных сил; в — эпюра напряжений;
г— эпюра перемещений
127

7.1.2.Температурные напряжения в статически неопределимых стержневых системах
Рассмотрим два стержня, из которых первый (рис. 7.3, а) представляет собой систему статически определимую, а второй (рис. 7.3, б) — статически неопределимую.
При нагревании на Dt°C стержень, заделанный одним концом, увеличит свои поперечные и продольные размеры (рис. 7.3, а). Увеличение длины согласно известной из физики формуле составит
Dlt = aDt · l,
где α — температурный коэффициент линейного расширения.
Так как никаких препятствий к удлинению стержня нет, то никакие внутренние усилия в нем не возникнут.
При нагревании на Dt°C стержня (рис. 7.3, б), заделанного двумя концами, возникнет внутреннее сжимающее усилие, т.к. вторая заделка препятствует удлинению стержня (рис. 7.3, в).
Отсюда следует общее правило: в статически определимых системах при изменении температуры возникают деформации без появления внутренних усилий; в статически неопределимых системах изменение температуры сопровождается появлением внутренних усилий. Для определения последних применим обычный способ рас-
а
lDlt = aDt · l
б
l
∆lX = EAXl
X
в
lDlt = aDt · l
Рис. 7.3. Температурное воздействие:
а— деформация статически определимого стержня;
б— статически неопределимый стержень;
в— деформация статически неопределимого стержня
128
чета статически неопределимых систем. Мысленно отбросим одну из заделок, например, правую. Тогда стержень имеет возможность удлиняться на величину Dlt = aDt · l. Но реактивная сила Х сжимает стержень на величину Dlt = Xl / (EA) (рис. 7.3, в).
Фактически перемещение правого крайнего сечения равно нулю:
aDt · l – Xl / (EA) = 0. |
|
Отсюда |
|
X = EAaDt. |
(7.4) |
st = X / A = EaDt. |
(7.5) |
Температурные напряжения σt могут иметь очень значительную величину. Для их уменьшения в конструкциях предусматриваются специальные температурные зазоры (швы).
Пример 7.2. Определить напряжения, возникающие на каждом из участков стержня, выполненного из разнородных материалов (рис. 7.4, а), при нагревании его на Dt = 30 °С.
Данные для расчета:
—площади поперечных сечений каждого из участков А1 = А3 =
=100 мм2; А2 = 150 мм2;
—длины каждого из участков l1 = l3 = 0,4 м; l2 = 0,3 м;
—коэффициенты линейного расширения материалов:
стали aст = 12·10–6 1/град; меди aм = 12·10–6 1/град;
— модули упругости: стали Eст = 2·105 МПа;
меди Eм = 0,84·105 МПа. Р е ш е н и е
1.С т а т и ч е с к а я с т о р о н а з а д а ч и. Задача один раз статически неопределима, т.к. для решения ее необходимо определить две вертикальные составляющие реакций, возникающих в верхней
инижней заделках. Условно отбросим нижнюю заделку, заменив ее
воздействие на стержень реакцией RB (рис. 7.4, б). Таким образом, преобразуем ее в статически определимую.
2.Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и. Рассматривая деформацию стержня, отмечаем, что удлинение от воздействия тем-
пературы компенсируется укорочением от действия реакции RB. Суммарная деформация равна нулю (стержень зажат двумя заделками):
∆lt + ∆lRB = 0.
129

C |
Сталь |
l |
|
1 |
|
l |
Медь |
2 |
|
l |
Сталь |
3 |
|
A1
A2
A3
RB
а |
б |
Рис. 7.4. Температурные напряжения:
а— статически неопределимый стержень;
б— приведение к статически определимому стержню
3.Ф и з и ч е с к а я с т о р о н а з а д а ч и. Под воздействием температуры каждый из участков стержня получит удлинение
Dl1t = aст · Dt · l1;
Dl2t = aм · Dt · l2;
Dl3t = aст · Dt · l3.
Суммарное удлинение стержня составит
Dlt = Dl1t + Dl2t + Dl3t = 2aст · Dt · l1 + aм · Dt · l2,
т.к. по условию задачи l1 = l3.
Это удлинение компенсируется сжатием всего стержня реакцией RB.
|
|
|
∆lR |
= ∆l1R |
|
+ ∆l2R |
|
+ ∆l3R , |
|||||||||
|
|
|
B |
|
|
B |
|
|
B |
|
|
|
|
|
B |
|
|
где ∆l = |
−RB l1 |
; ∆l |
= − |
RB l2 |
; ∆l |
|
= − |
RB l3 |
. |
|
|||||||
|
|
|
|
|
|
||||||||||||
1RB |
Eст A1 |
2RB |
|
Eм A2 |
|
3RB |
|
|
Eст A3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R |
l |
|
R |
l |
2 |
|
|
|
||||
|
|
|
∆lRB |
= − |
|
|
B |
1 |
+ |
|
B |
|
|
|
, |
||
|
|
|
|
Eст A1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
Eм A2 |
|
|||||||||
т.к. A1 = A3 и l1 = l3 по условию задачи.
130
4. С и н т е з. Согласно условию совместности деформаций
|
|
|
|
|
Dlt + DlR = 0. |
|
|
|
|
||||
Подставляя значения Dlt и DlR, имеем |
|
|
|
|
|||||||||
2α |
|
∆t l |
+ α |
|
∆t l |
|
− |
|
2RB l1 |
+ |
RB l2 |
|
= 0 |
ст |
м |
2 |
|
|
|
||||||||
|
1 |
|
|
|
|
Eм A2 |
|
||||||
|
|
|
|
|
|
|
|
Eст A1 |
|
|
|
||
или
2 12 10−6 30 400 + 17 10−6 30 300 =
= |
2RB 400 |
+ |
RB 300 |
|
|
|
. |
||
2 105 100 |
0,84 105 150 |
|||
Отсюда RB = 6912 Н.
5. Определяем напряжения на каждом из участков нагружения стержня:
σ |
= − |
|
RB |
|
|
= − |
6912 |
|
= −69 МПа; |
||
|
|
|
|
||||||||
1 |
|
|
|
A1 |
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
σ2 |
= − |
|
RB |
|
|
= − |
6912 |
|
= −46 МПа; |
||
|
A2 |
|
150 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
σ3 |
= − |
RB |
|
|
= − |
6912 |
|
= −69 МПа. |
|||
A3 |
|
|
100 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
7.1.3.Монтажные напряжения в статически неопределимых стержневых системах
Кроме напряжений от действия температуры, в статически неопределимых системах возникают напряжения при монтаже конструкции вследствие того, что стержни могут иметь отклонения от расчетной длины из-за неточности изготовления.
Методику расчета статически неопределимых стержневых систем с учетом монтажных зазоров рассмотрим на примере.
Пример 7.3. Определить монтажные напряжения на каждом из участков нагружения стального стержня (рис. 7.5, а), если до приложения силы F он имел зазор = 0,2 мм. Данные для расчета:
—длины участков нагружения l1 = 180 мм; l2 = 250 мм; l3 = 200 мм;
—площади поперечных сечений А1 = 100 мм2; А2 = 160 мм2; А3 =
=120 мм2;
—модуль упругости стали E = 2·105 МПа;
—сила F = 10 кН.
131
C
l1
l2
l3
B
A1 |
|
|
|
A2 |
|
|
|
F |
|
|
F |
A3 |
D |
D |
Dl |
|
B
DR RB
а |
б |
Рис. 7.5. Монтажные напряжения:
а— стержень до приложения силы F;
б— стержень после приложения силы F
Р е ш е н и е
1. С т а т и ч е с к а я с т о р о н а з а д а ч и. При достаточно большой величине силы F зазор закроется, и возникнет реакция RB. В этом случае задача становится статически неопределимой.
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и. Для определения реакции RB отбросим нижнюю заделку. Ее действие на стержень представим силой RB. Отрезок l изображает то перемещение, которое получило бы сечение под действием силы F при отсутствии за-
делки. Отрезок R представляет собой перемещение сечения под действием реакции RB. На рис. 7.5, б видно, что условие совместности деформации в этом случае имеет вид
Dl = D + DR.
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Удлинение стержня от силы F равно удлинению участка I (рис. 7.5, б)
∆l = ∆l1 = N1l1 = Fl1 ,
EA1 EA1
т.к. N1 = F (продольные силы на участках II и III отсутствуют).
132
Укорочение стержня от реакции RB равно сумме укорочений каждого из участков стержня:
|
|
|
|
∆R = ∆1R + ∆2R + ∆3R = |
|
|
|
|
|
||||||||||
R |
l |
R l |
2 |
|
R |
l |
|
|
R |
l |
l |
2 |
|
l |
|
||||
= − |
B |
1 |
+ |
B |
+ |
B |
3 |
|
= − |
B |
|
1 |
+ |
|
+ |
3 |
. |
||
|
|
EA2 |
|
EA3 |
|
|
|
|
|
||||||||||
|
EA1 |
|
|
|
|
E A1 |
A2 |
A3 |
|||||||||||
4. С и н т е з. Решая условие совместности деформаций, выраженное через закон Гука, получаем
|
|
|
|
Fl |
|
|
R |
l |
|
|
|
|
|
l |
2 |
|
|
l |
|
|
|
|
|||
|
|
|
|
1 |
|
= ∆ − |
|
B |
|
1 |
|
|
+ |
|
+ |
|
3 |
|
|
|
|
||||
|
|
|
|
EA1 |
|
|
|
|
|
A2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
E A1 |
|
|
|
|
|
A3 |
|
|
|
||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 103 180 |
|
= 0,2 − |
|
RB |
|
|
|
180 |
+ |
250 |
|
+ |
200 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|||||
|
2 10 |
5 |
100 |
|
|
10 |
5 |
100 |
160 |
|
|
||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
120 |
||||||||||||||
Выражая реакцию RB, получаем RB = 4,37 кН.
5. Вычисляем продольные силы на каждом из участков нагру жения:
N1 = –RB + F = –4,37 + 10 = 5,63 кН;
N2 = –RB = –4,37 кН;
N3 = –RB = –4,37 кН.
6. Определяем напряжения на каждом из участков нагружения стержня:
σ |
= |
|
N |
1 |
= |
5,63 103 |
= 56,3 МПа; |
|||||||
|
|
|
|
|
|
|
|
|||||||
|
1 |
|
|
|
|
A1 |
100 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
σ2 |
= |
|
N |
2 |
|
= − |
|
4,37 103 |
= −27,3 |
МПа; |
||||
|
|
A2 |
160 |
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||
σ3 |
= |
|
N |
3 |
|
= − |
4,37 103 |
= −36,4 |
МПа. |
|||||
|
A3 |
120 |
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||
7.2.СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ ШАРНИРНО-СТЕРЖНЕВЫЕ СИСТЕМЫ ПРИ РАСТЯЖЕНИИ И СЖАТИИ
Как указывалось (п. 7.1) механическая система, для которой реакции связей и внутренние силовые факторы не могут быть определены с помощью уравнений равновесия статики и метода сечений,
133

называется статически неопределимой. Статически неопределимые системы отличаются от статически определимых большим числом наложенных связей.
На рис. 7.6 показаны статически определимые системы, нормальные силы N в которых определяют с помощью двух уравнений: проекции сил на оси x и y (рис. 7.6, а), одного уравнения моментов относительно неподвижного шарнира и одного уравнения проекций сил на ось y (рис. 7.6, б).
N2 y
2x
N1 |
F |
F |
N |
|
1F
а |
б |
Рис. 7.6. Статически определимые шарнирно-стержневые системы: а — кронштейн; б — подвеска
Все статически неопределимые конструкции имеют дополнительные или так называемые лишние связи в виде закреплений, стержней либо других элементов. Лишними такие связи называют только потому, что они не являются необходимыми для обеспечения равновесия конструкции и ее геометрической неизменяемости, хотя постановка их диктуется условиями эксплуатации. По условиям прочности и жесткости конструкции лишние связи могут оказаться необходимыми.
В статически неопределимых конструкциях число неизвестных, подлежащих определению, больше, чем число уравнений статики, которые могут быть для этой цели использованы. Разница между числом неизвестных и числом уравнений статики определяет число лишних не известных, или степень статической неопределимости конструкции. На рис. 7.7 показаны статически неопределимые системы.
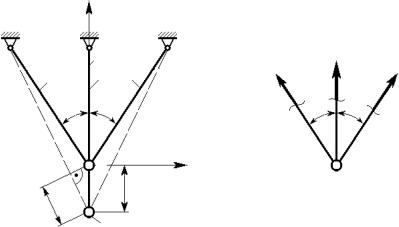
Система на рис. 7.7, а один раз статически неопределима, т.к. в два уравнения проекций сил, которые можно составить в данном случае, входят три неизвестные величины: N1, N2 и N3. Система на рис. 7.7, б два раза статически неопределима: в те же два уравнения статики входят четыре неизвестные величины. Для решения этих задач в первом случае нужно составить одно дополнительное уравнение перемещений, а во втором — два исходя из условия, что при изменении длины стержней узел А остается для них общим. Система
134

|
|
N3 |
|
y |
|
|
|
|
y |
|
|
3 |
|
A x |
|
|
|
|
|
||
|
N2 |
|
2 |
3 |
|
|
N3 |
|
||
|
2 |
|
F |
N |
|
N4 |
||||
|
N1 |
|
4 |
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
A |
|
|
A |
x |
|
|
|
|
|
N1 |
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
F |
F |
|
||
|
|
|
|
|
|
|
|
|
||
|
а |
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
N |
1 |
N |
2 |
F |
|
N1 |
F |
N2 |
A1 |
F |
|
F |
|
|
|
||||
|
|
|
|
|
|
|||||
B |
A |
|
B |
A |
B |
A |
|
B |
||
в |
г |
Рис. 7.7. Статически неопределимые шарнирно-стержневые системы:
а, в — один раз статически неопределимые; б, г — два раза статически неопределимые
на рис. 7.7, в один раз статически неопределима, и к уравнению моментов сил относительно точки А, содержащему две неизвестные силы (N1 и N2), нужно дополнительно составить одно уравнение перемещений. На рис. 7.7, г изображена два раза статически неопределимая система, и дополнительных уравнений перемещений необходимо составить два. В подобных случаях уравнения перемещений составляют из условия, что места закрепления стержней на жесткой балке АВ остаются на одной прямой.
Если число неизвестных сил системы на n превышает число уравнений статики, которые можно составить для нее, то система называется n раз статически неопределимой, и для решения задачи необходимо составить n уравнений перемещений.
Методика решения (раскрытия статической неопределимости) шарнирно-стержневых систем по-прежнему включает рассмотрение статической, геометрической и физической сторон задачи, их синтез.
7.2.1.Статически неопределимые шарнирно-стержневые системы под воздействием нагрузки
Рассмотрим решение подобного рода задач на конкретных примерах.
Пример 7.4. Проверить прочность стержней подвески и определить перемещение узла К под действием груза F = 30 кН (рис. 7.8).
135

|
y |
|
|
|
|
|
B |
C |
|
l |
D |
N2 |
|
l |
lcosa |
N1 |
N3 |
|||
1 |
2 |
3 |
|
|
||
|
|
|
|
|||
a |
a |
|
|
|
a a |
|
|
K |
|
|
x |
K |
|
|
|
Dl2 |
|
|
F |
|
Dl1 |
K′ |
|
|
|
|
|
|
|
|
|
|
||
|
F |
|
|
|
|
|
а |
|
|
|
|
б |
|
Рис. 7.8. Статически неопределимая шарнирно-стержневая подвеска: а — схема нагружения; б — усилия в стержнях
Данные для расчета: α = 30°; l2 = 1 м; [σ] = 160 МПа; Е = 2·105 МПа; А = 1 см2. Материал и сечения стержней одинаковы.
Р е ш е н и е. Рассмотрим равновесие узла К. Для этого отделяем узел К и вводим внутренние силы N1, N2 и N3. Для вычисления усилий в трех стержнях подвески можно составить лишь два независимых уравнения равновесия. Система один раз статически неопределима.
1. С т а т и ч е с к а я с т о р о н а з а д а ч и.
ΣFx = 0; N3 sin α − N1 sin α = 0; N1 = N3 = N; |
(7.6) |
ΣFy = 0; N1cosα + N2 + N3cosα − F = 0; N2 = −2Ncosα + F . (7.7)
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций стержней). Представим себе, что узел К сместился вниз, оставаясь на оси симметрии, и точка К заняла положение К′. Отрезок КК′ представляет собой удлинение среднего стержня l2.
Удлинение крайнего стержня 1 можно найти, проведя дугу радиусом КВ из центра В. Вследствие малости деформаций дугу можно заменить перпендикуляром, опущенным из точки К на новое положение стержня (показано пунктиром). Система после деформации показана на рис. 7.8, а. Между удлинениями стержней 1 и 2 существует зависимость
Dl1 = Dl2cosa. |
(7.8) |
136
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Согласно закону Гука
∆l = |
N1l |
; ∆l |
2 |
= |
N2l |
. |
(7.9) |
|
|
||||||
1 |
EAcosα |
|
|
EA |
|
||
|
|
|
|
|
|||
4. С и н т е з.
С учетом уравнения совместности деформаций имеем
N1l |
= |
N2l |
cosα или N1 = N2 cos2 |
α. |
(7.10) |
EA |
|
||||
|
EA |
|
|
||
Решая совместно уравнения равновесия (7.7) и уравнение совместности деформаций (7.10), находим усилия в стержнях
N2 |
= |
|
|
|
F |
= |
|
|
|
|
|
30 |
|
= 13,1 кН; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
+ 2cos3 α |
1 + 2(0,866)3 |
|||||||||||||
|
1 |
|
|
|
|||||||||||
N1 = |
N3 |
= |
|
F cos2 |
α |
|
|
= |
|
30 |
(0,866)2 |
= 9,8 кН. |
|||
|
+ 2cos3 α |
|
1 |
+ 2(0,866)3 |
|||||||||||
|
|
|
1 |
|
|
|
|||||||||
5. Наибольшее напряжение возникает стержне 2:
σ = |
N |
2 |
= |
13,1 103 |
= 131 |
МПа, |
|
A |
|
|
100 |
||||
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
что меньше заданного допускаемого напряжения [σ] = 160 МПа. 6. Перемещение узла К равно удлинению стержня 2:
δ A |
|
N |
2 |
l |
2 |
|
13,1 103 103 |
|
||
= |
|
|
= |
|
|
= 0,655 |
мм. |
|||
|
|
|
|
2 105 |
|
|||||
|
|
E2 A2 |
100 |
|
||||||
Пример 7.5. Жесткий брус удерживается в равновесии двумя стальными стержнями круглого поперечного сечения одного и того же диаметра (рис. 7.9, а) и одним концом закреплен шарнирно. Оп ределить необходимые диаметры этих стержней, если [σ] = 150 МПа. Материал всех стержней одинаков.
Задача один раз статически неопределима, т. к. число неизвестных (усилия N1 и N2 в стержнях, опорные реакции: горизонтальная и вертикальная составляющие в шарнире О) превышает число независимых уравнений равновесия ΣFx = 0; ΣFy = 0 и ΣM0 = 0 на единицу (4 неизв. – 3 уравн. равновесия = 1).
Р е ш е н и е 1. С т а т и ч е с к а я с т о р о н а з а д а ч и. Рассекая стержни и
заменяя действие их отброшенных частей на жесткий брус нормаль-
137

|
d |
|
|
|
|
|
d |
|
|
|
l1 = 1 м |
|
|
2 |
|
|
|
|
|
|
|
||
|
|
|
1 |
F = 80 кН |
l2 |
= 1,5 м |
|
а |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
O |
|
B |
C |
|
D |
|
|
|
|
|
|
|
|
|
|
|
0,4 м |
|
|
|
|
|
|
|
1 м |
|
1 м |
|
|
|
|
|
|
2 м |
|
|
|
|
|
|
|
N1 |
F |
|
N2 |
|
|
|
|
|
|
|||
б |
O |
B Dl1 |
C |
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
1 |
|
|
Dl2 |
|
|
|
|
|
|
|
|
|
D1
Рис. 7.9. Жесткий брус, подвешенный на двух стержнях: а — схема нагружения; б — схема деформации
ными силами N1 и N2 , получаем расчетную схему (рис. 7.9, б), для которой запишем уравнение статики (уравнение моментов сил относительно точки О):
SM0 = 0; N1 · OB – F · OC + N2 · OD = 0. Следовательно,
0,4N1 + 2N2 = F. |
(7.11) |
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций).
Под действием силы F каждый из стержней получит удлинение. Причем, чем дальше стержень расположен от силы F, тем будет наблюдаться большее его удлинение. Наличие шарнира О предполагает, что жесткий брус повернется вокруг точки О. Деформированное состояние системы представлено на рис. 7.9, б. Рассматривая подобие треугольников ОВВ1 и ОДД1, имеем
138

∆l1 |
= |
OB |
или Dl1 = 0,2Dl2. |
(7.12) |
|
∆l2 |
OD |
||||
|
|
|
Последнее выражение и есть условие совместности деформации. 3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Под действием силы
F стержни 1 и 2 удлиняются соответственно на
|
|
∆l = |
N1l1 |
; ∆l |
2 |
= |
N2l2 |
. |
|
|
||||
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
EA |
|
EA |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
4. С и н т е з. Подставляя выражения l1 и |
l2 в условие совмест- |
|||||||||||||
ности деформаций (7.12), получим |
|
|
|
|
|
|
|
|
||||||
|
N1l1 |
= 0,2 |
N2l2 |
|
или N1 |
|
= 0,2 |
l2 |
N2 |
= 0,3N2. |
(7.13) |
|||
|
|
|
|
|||||||||||
|
EA |
EA |
|
l1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Решив совместно уравнение равновесия (7.11) и уравнение, связывающее N1 и N2 (7.13), находим
N1 = 11 кН; N2 = 37,7 кН.
5. Из условия прочности более нагруженного стержня 2 находим требуемую площадь поперечного сечения:
A ≥ |
N |
2 |
= |
37,7 103 |
= 251 мм2. |
|
|
|
|||
2 |
[s] |
150 |
|
||
|
|
||||
6. Диаметр стержня:
d = |
4A |
= |
4 251 |
= 17,9 мм. |
||
π |
π |
|
||||
|
|
|
||||
Округляя по нормальному ряду (прил. 4, ряд Ra40), принимаем d1 = d2 = d = 18 мм.
7.2.2.Температурные напряжения в статически неопределимых шарнирно-стержневых системах
Рассмотрим статически неопределимые шарнирно-стержне- вые системы, для которых возникновение внутренних сил связано с внешним температурным воздействием.
Пример 7.6. Трехстержневая ферма (рис. 7.10) подвержена внешнему температурному воздействию — нагреву на t = 30 °C. Длина среднего стержня l = 1 м, а произведение ЕА для всех стержней одинаковое ЕА = 2·107 Н. Найти температурные напряжения в стержнях
139
|
y |
|
|
B |
C |
D |
|
|
lcosa |
N1 |
N2 |
|
|
N |
|
1 |
2 |
3 |
3 |
|
|||
b |
b |
b |
b |
|
K |
x |
K |
|
|
|
|
|
|
Dl2 |
|
Dl1 |
K1 |
|
|
|
|
|
|
|
а |
|
б |
Рис. 7.10. Трехстержневая ферма:
а— деформированное состояние; б — расчетная схема
иперемещение узла К, если β = 30°; материал стержней сталь, для которой коэффициент температурного расширения α= 125·10–7 1/град.
Ре ш е н и е
1. С т а т и ч е с к а я с т о р о н а з а д а ч и. Мысленно вырезаем узел К и вводим внутренние силы N1, N2, и N3 (рис. 7.10, б). По условию симметрии усилия в боковых стержнях одинаковы (N1 = N3). К этому же выводу мы придем, если приравняем нулю сумму проекций сил на горизонтальную ось:
|
SFx = 0; –N1 · sinb + N3sinb = 0, |
|
следовательно, N1 |
= N3. |
|
По второму уравнению равновесия получаем |
|
|
ΣFy = 0; N1 · cosb + N2 + N3cosb = 0 |
|
|
или |
|
|
|
2N1 · cosb + N2 = 0. |
(7.14) |
Два неизвестных N1 и N2, а уравнение равновесия одно. Система один раз статически неопределима. Необходимо составить дополнительное уравнение перемещений.
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций). Представим, что под воздействием температуры произошло удлинение стержней и узел К сместился вниз,
140
оставаясь на оси симметрии (рис. 7.10, а). Точка К заняла положение К1. Отрезок КК1 представляет собой удлинение второго стержня l2. Удлинение первого стержня находим, проведя дугу окружности КВ с центром в точке В. За малостью перемещений (упругие деформации) дугу КВ рассматриваем, как перпендикуляр, опущенный на прямую К1B. При этом угол bизменился незначительно и, следовательно, можно записать
l1 = l2 · cosβ.
Это и есть необходимое уравнение перемещений.
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Удлинение каждого стержня складывается из силового и температурного, т.е.
∆l1 |
= |
|
N1l |
|
+ |
l |
a ∆t; |
|
|
EAcosβ |
cosβ |
||||||
|
|
|
|
|
|
|||
|
|
∆l2 = |
N2l |
|
+ la∆t. |
|||
|
|
EA |
||||||
|
|
|
|
|
|
|||
4. С и н т е з. Подставляя выражения, отражающие физическую сторону задачи, в уравнение перемещений, получаем
|
l |
|
N |
1 |
|
|
|
|
N |
2 |
|
|||
|
|
|
|
|
|
+ a∆t |
= l |
|
+ a∆t cosβ |
|||||
|
|
|
|
|
|
|
|
|||||||
|
cosβ EA |
|
|
|
EA |
|
||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
N |
1 |
|
|
|
|
N |
2 |
|
|
|
|
|
|
|
|
|
|
+ a∆t = |
|
+ a∆t cos2 β. |
|||||||
|
|
EA |
|
|
||||||||||
|
|
|
|
EA |
|
|
|
|||||||
Преобразуя выражение (7.15), находим |
||||||||||||||
|
N1 |
= N2 cos2 β - a∆tEA(1 - cos2 β). |
||||||||||||
(7.15)
(7.16)
Решая уравнение (7.16) совместно с уравнением (7.14), получаем
|
|
|
|
|
N1 |
= - |
a∆tEA(1 - cos2 β) |
= |
|
|
||||||||
|
|
|
|
|
( |
|
|
|
|
) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1 + 2cos3 β |
|
|
|
|
|
||||
|
= - |
125 |
10−7 30 2 107(1 - 0,8662 ) |
= -1143 H; |
||||||||||||||
|
|
|
|
|
1 + 2 0,8663 |
) |
|
|
|
|
||||||||
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2a∆tEA |
(1 - cos2 β)cosβ |
|
||||||||
|
|
|
|
|
N2 |
= |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
( |
+ 2cos3 |
β |
) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
= |
2 |
125 10−7 |
30 2 107(1 - |
0,8662 ) 0,866 |
= 2027 H. |
|||||||||||||
|
|
|
|
|
|
1 + 2 0,8663 |
) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
||
141
Подставляя в (7.14), находим
N3 = N1 = –1143 Н.
Первоначально усилия N1, N2, и N3 были выбраны растягивающими (рис. 7.10, б). Полученные в результате расчета знаки, по казали, что усилие в среднем стержне оказалось растягивающим,
ав крайних — сжимающим.
5.Температурные напряжения в стержнях составят
σ |
= σ |
|
= |
N1 |
= − |
1143 |
= −11,4 МПа, |
|
|
|
|
|||
|
A |
1 102 |
|
|
|
|
||||||||
1 |
|
3 |
|
|
|
|
|
|
|
|
|
|
||
где А — площадь поперечного сечения стержней, A = |
EA |
= |
2 |
107 |
= 1 10 |
2 |
мм2. |
|||||||
E |
2 |
105 |
|
|||||||||||
σ2 = NA2 = 12 027102 = 20,3 МПа.
6.Вычисляем перемещение узла К. Оно равно удлинению среднего стержня
|
∆K |
= ∆l2 = |
N2l |
+ lα∆t = |
|
|
EA |
||||
|
|
|
|
||
= |
2027 1 103 |
+ 1 103 125 |
10−7 30 = 0,47 мм. |
||
2 105 102 |
|||||
|
|
|
|
||
Пример 7.7. Жесткая балка (рис. 7.11) подвешена на двух одинаковых стальных тягах длиной l и одним концом закреплена шарнирно. Определить напряжения в тягах, если повысить температуру системы на t = 45°C. Коэффициент температурного удлинения стали α = 125·10–7 1/град, произведение ЕА = 3·107 Н; А = 1,5·102 мм2.
Р е ш е н и е. Механизм возникновения температурных напряжений в данной системе достаточно очевиден. Если бы стержни не были связаны друг с другом через балку, они получили бы одинаковые температурные удлинения, но этому препятствует жесткая балка. При ее повороте удлинение левого стержня оказывается большим, чем правого. Правый стержень мог бы еще удлиниться, но он упирается в балку, и в нем возникает сжимающее усилие. Температурное удлинение левого стержня не поспевает за тем перемещением, которое связано с поворотом балки, и здесь возникает растягивающее усилие. Таким образом, правый стержень сжат и растягивает левый. Левый растянут и сжимает правый. Образуется система внутренних самоуравновешенных сил. Следует отметить, что возникновение температурных напряжений характерно только для статически неопределимых систем. В статически определимых системах кинематиче-
142

ские свойства таковы, что удлинения стержней при температурном воздействии возрастают свободно и ничем не стеснены.
1. С т а т и ч е с к а я с т о р о н а з а д а ч и. Проведем мысленно сечение через обе тяги, заменив отброшенную часть конструкции силами N1 и N2 (рис. 7.11, а). И хотя эти силы имеют разные знаки, примем их растягивающими. Знаки полученных в дальнейшем усилий покажут, правильно их направили или нет.
а
б
|
1 |
|
2 |
|
N |
1 |
N |
2 |
Rky |
C |
Rkx |
B |
|
|
|
|
|
K |
|
|
4a |
|
a |
|
Dl2
C |
B K |
1 |
B′ |
Dl |
|
C′ |
|
Рис. 7.11. Жесткая балка под внешним воздействием температуры: а — расчетная схема; б — деформированное состояние
Записываем уравнения равновесия. |
|
ΣFх = 0; –Rкх = 0; |
|
ΣFy = 0; N1 + N2 + Rкy = 0; |
|
ΣMK = 0; –N1 · 5a — N2 · a = 0; |
|
следовательно, |
|
N2 = –5N1. |
(7.17) |
143

Итак, имеем три уравнения и четыре неизвестных (Rкх; Rкy; N1 и N2). Задача один раз статически неопределима.
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций). Уравнение перемещений составляем, опираясь на подобие треугольников КВВ′ и КСС′ (рис. 7.11, б).
|
BB′ |
= |
a |
или |
∆l2 |
= |
1 |
. |
|
CC′ |
5a |
∆l |
5 |
||||
|
|
|
|
|
||||
|
|
|
|
|
1 |
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
|
|
l1 = 5 |
l2. |
|
|
(7.18) |
|
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Удлинение каждого стержня складывается из силового и температурного
∆l1 = NEA1l + la∆t; ∆l2 = NEA2l + la∆t.
4. С и н т е з. Перепишем уравнение перемещений в силах, заменяя l1 и l2
|
N l |
|
|
|
N |
l |
|
|
|
1 |
+ la∆t |
= |
5 |
2 |
|
+ la∆t |
|
|
EA |
|
|
|||||
|
|
|
EA |
|
|
|||
или |
|
|
|
|
|
|
|
|
|
|
N1 – 5N2 = 4EAaDt. |
(7.19) |
|||||
Решая выражение (7.19) совместно с условием равновесия (7.17), получаем
|
N1 |
= |
2 |
EAα∆t = |
2 |
3 107 125 10−7 45 = 2596 H. |
|||
|
|
|
13 |
||||||
|
|
|
13 |
|
|
||||
N2 |
= − |
10 |
EAα∆t = − |
10 |
3 107 125 10−7 45 = −12 980 H. |
||||
13 |
13 |
||||||||
|
|
|
|
|
|
||||
5. Температурные напряжения в стержнях будут равны
s1 = NA1 = 1,25596102 = 17,3 МПа;
s2 = NA2 = -112,5 980102 = -86,5 МПа.
144

7.2.3.Монтажные напряжения в статически неопределимых шарнирно-стержневых системах
Свободная сборка статически неопределимых систем возможна лишь при весьма точном изготовлении их элементов. В противном случае сборку вынуждены осуществлять с приложением усилий, вызывающих деформации элементов, поэтому в них после монтажа системы будут напряжения, называемые начальными или монтажными. В статически определимых конструкциях неточность размеров элементов не требует приложения усилий при монтаже, и в элементах не возникают начальные напряжения.
Пример 7.8. Определить напряжения, возникающие в стальных стержнях при сборке узла К из-за неточности изготовления стержней (рис. 7.12).
Данные для расчета: площадь сечения всех стержней одинаковая
А1 = А2 = А3 = А = 2 см2; длины стержней равны l1= l2 = l3 = l = 1 м; α = 30°; зазор δ = 1 мм.
Р е ш е н и е 1. С т а т и ч е с к а я с т о р о н а з а д а ч и. Мысленно отделяем
узел К (рис. 7.12, а) и вводим внутренние силы N1, N2 и N3. По условию симметрии (или из условия равновесия ΣFх = 0) N2 = N3 (поэтому усилие в стержне 3 обозначим через N2 ). По второму уравнению равновесия получаем
Fy = 0; N1 – 2N2 cosα = 0; или N1 = 2N2 cosα. |
(7.20) |
Система один раз статически неопределима.
2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций). Предположим, что после соединения, шарнир К займет положение К1 (рис. 7.12, б). Следовательно, условие совместности деформаций
∆l1 + |
∆l2 |
= δ или Dl2 |
= (δ – Dl1)cosa. |
(7.21) |
|
cosα |
|||||
|
|
|
|
Удлинение l2 можно получить, если из точки В описать дугу радиусом ВК, однако в силу малости деформаций достаточно опустить перпендикуляр из точки К на новое положение стержня 2 (показано пунк тиром). В собранном состоянии угол между стержнями 2 и 3 будет меньше, чем 2α, но из-за малых деформаций изменение угла отразится на пятом или шестом знаке значения косинуса, что не существенно.
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Согласно закону Гука
∆l1 = N1l1 ; ∆l2 = N2l2 .
E1 A1
145

|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dl2 |
Dl1 d |
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
K1 |
2 |
a a |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
||
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
N2 |
|
N2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
Рис. 7.12. Монтажные напряжения: |
|
||||||||||||||||
|
|
а — расчетная схема; б — схема деформации |
|
||||||||||||||||
4. С и н т е з. Подставляя значения l1 и l2 и учитывая, что А1 = |
|||||||||||||||||||
= А2 =А3 = А и Е1 = Е2 = Е3 = Е |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
N |
l |
|
|
|
|
|
N l |
|
||||||||
|
|
|
2 |
|
= δ |
− |
|
|
1 |
|
cosα. |
|
|||||||
|
|
|
EA |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
EA |
|
|||||||||
Выразим N2 через N1 и δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
EA |
|
|
|
|
|
N l |
|
||||||
|
|
N2 = |
|
|
|
|
δ − |
|
|
|
1 |
cosα |
(7.22) |
||||||
|
|
|
l |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
EA |
|
||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
1 |
|
|
|||||
|
|
|
N2 |
|
= c |
δ − |
|
|
|
|
cosα, |
(7.23) |
|||||||
|
|
|
|
|
|
c |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где с — податливость стержня, с = ЕА / l . |
|
|
|
|
|
||||||||||||||
Подставляя N2 в уравнение равновесия (7.20), получим |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
N |
1 |
|
|
|
|
|
|
|||
|
|
N1 − 2c δ − |
|
|
cos2 α = 0. |
(7.24) |
|||||||||||||
|
|
|
c |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
146
Находим растягивающее усилие в стержне
|
|
|
N1 |
= |
|
|
2ccos2 α |
|
δ. |
|
(7.25) |
|
|
|
1 + 2cos2 α |
|
|||||||
|
|
|
|
|
|
|
|
||||
При c = |
EA |
= |
2 105 2 102 |
= 4 104 |
Н / мм N |
|
= 24 кН. |
||||
l |
1 103 |
|
|
|
1 |
||||||
|
|
|
|
|
|
|
|
|
|||
Усилия в боковых стержнях определим на основании преобразованного уравнения равновесия
N2 = |
N1 |
= |
24 |
= 13,8 кН. |
|
2cosα |
2 0,866 |
||||
|
|
|
5. Определяем монтажные напряжения в стержнях
|
|
σ = |
N |
1 |
|
= |
|
24 103 |
= 120 МПа; |
|||||
|
|
A1 |
|
|
2 102 |
|||||||||
|
|
1 |
|
|
|
|
|
|
|
|||||
σ |
2 |
= σ |
3 |
= |
|
N |
2 |
|
= |
13,8 |
103 |
= 69 МПа. |
||
|
|
A2 |
|
|
2 102 |
|||||||||
|
|
|
|
|
|
|
|
|||||||
Знаки усилий и напряжений показывают, что во всех трех стерж нях присутствует деформация растяжения.
Пример 7.9. Жесткая балка (рис. 7.13) должна быть подвешена на трех одинаковых стальных стержнях. При сборке после того как два стержня были установлены, обнаружилось, что проушина третьего стержня не совпадает с отверстием в балке. Возникший зазор был компенсирован усилиями, приложенными к балке, и система была принудительно собрана. Необходимо определить напряжения в стержнях и перемещение шарнира В. Если площадь поперечного сечения стержней А = 5 см2, длина стержней l = 0,6 м, зазор = 1 мм.
Р е ш е н и е. 1. С т а т и ч е с к а я с т о р о н а з а д а ч и. После сборки в стержнях появились внутренние усилия N1, N2 и N3. Они самоуравновешены — внешних сил нет. Мысленно проведя сечения через три стержня (рис. 7.13, б), отделяем балку и составляем уравнения равновесия
SFy = 0; N1 + N2 + N3 = 0;
SMB = 0; –N1 · a + N3 · a = 0,
следовательно,
N1 = N3; N2 = – 2N3 = –2N1. |
(7.26) |
Итак, получили два уравнения с тремя неизвестными. Задача один раз статически неопределима.
147

2. Г е о м е т р и ч е с к а я с т о р о н а з а д а ч и (условие совместности деформаций). Представим себе, что после сборки балка переместилась вниз и при этом повернулась (рис. 7.13, а). Мы специально берем такое смещение балки, чтобы все стержни удли нились, т.е. мы приняли, что все усилия в стержнях растягивающие (рис. 7.13, б).
Рассматривая отрезок ВВ’ как среднюю линию трапеции АА’СС’, имеем
BB′ = |
1 |
( AA′ + CC′) или 2Dl2 – Dl1 – Dl3 = –D. |
(7.27) |
|
2 |
||||
|
|
|
3. Ф и з и ч е с к а я с т о р о н а з а д а ч и. Выражаем удлинения стержней через силы по закону Гука
∆l |
= |
N1l |
; ∆l |
2 |
= |
N2l |
; ∆l |
= |
N3l |
. |
(7.28) |
|
|
|
|||||||||
1 |
|
EA |
|
EA |
3 |
|
EA |
|
|||
|
|
|
|
|
|
|
|||||
|
а |
а |
l |
|
l |
|
1 |
2 |
A |
|
B |
|
|
Dl2 |
A′ |
Dl1 |
B′ |
|
|
|
|
|
а |
|
N1 |
N2 |
A |
|
B |
l
C
C′
C
3
D
Dl3
N3
б
Рис. 7.13. Жесткая балка, подвешенная на трех стержнях: а — схема деформации; б — расчетная схема
148