

студ ивт 22 материалы к курсу физики / kingsep_as_lokshin_gr_olkhov_oa_kurs_obshchei_fiziki_osnovy
.pdf1.3 ] |
Системы отсчета. Радиус-вектор движущейся точки |
21 |
стве часов биение собственного пульса. Развитие науки и практические нужды общества потребовали единого эталона времени, по которому можно было бы сверять ход любых часов; до недавнего времени таковым являлся период обращения Земли вокруг
своей оси. Точнее, за эталонную единицу времени, называемую секундой, принималась 1 86 400 часть средних суток. Однако
сейчас физики научились использовать периодические процессы, которые происходят в микромире и которые могут служить гораздо более точными эталонами времени, чем средний период вращения Земли вокруг своей оси. Конкретно, за эталон времени сейчас принят период колебаний электромагнитного поля, испускаемого атомами химического элемента цезия при определенном изменении их внутренней энергии. В течение одной секунды совершается 9 192 631 770 вышеуказанных эталонных колебаний.
Из табл. 1 можно получить представление о характерных временных интервалах, с которыми приходится иметь дело в житейской и научной практике.
Можно в принципе поставить вопрос о том, как связан ход часов с их собственным движением. На сегодняшний день установлено, что в движущихся друг относительно друга часах время течет по-разному, но это отличие можно обнаружить лишь при относительных скоростях, близких к скорости света, 300 000 км/с. С такими скоростями физикам приходится иметь дело при изучении движения и превращений элементарных частиц, прилетающих к нам из космоса или разгоняемых до таких скоростей в специальных ускорителях. При ука-
занное изменение хода часов ничтожно, что позволяет считать время абсолютным.
1.3. Системы отсчета. Радиус-вектор движущейся точки
Принципиально важным оказывается свойство относительности всякого движения. В самом деле, находящийся в нашей ладони и покоящийся относительно нее предмет может совершать при этом сложное движение вместе с рукой относительно нашего тела. А если мы не стоим на месте, этот же предмет будет совершать еще более запутанное движение относительно каких-либо окружающих нас вещей. И, наконец, вместе с нами тот же предмет будет участвовать в очень сложном движении, обусловленном вращением Земли вокруг своей оси и вокруг Солнца.
Любые попытки установить какие-либо закономерности движения естественно начинать с выбора той совокупности тел,
22 |
Пространство. Время. Движение |
[ Гл. 1 |
относительно которых представляется важным или удобным рас-
сматривать движение интересующего нас объекта, и такую совокупность тел принято называть системой отсчета. В качестве
системы отсчета можно себе представить, например, три взаимно перпендикулярных недеформируемых прямолинейных стержня, пересекающихся в одной точке и жестко связанных в этой точке друг с другом. Главное свойство этой системы отсчета состоит
втом, что в каком бы месте она ни находилась, положение любой точки интересующего нас тела однозначно определяется
вней тремя расстояниями вдоль стержней-линий, отсчитанными
от точки их пересечения. Эти расстояния принято обозначать буквами , , , и они образуют хорошо известную декартову систему координат (см. рис. 1.1). Существуют и другие си-
стемы координат, выбор которых определяется соображениями целесообразности и удобства: полярные, сферические, параболические и т. д. Например, для определения положения объектов у поверхности Земли часто используется «географическая» система, где вместо параметров , , используются широта, долгота и высота над уровнем моря. Число независимых координат равно размерности пространства, т. е. в общем случае трем, но нередко физические явления удается смоделировать задачей меньшей размерности. Подчеркнем особо, что система координат — понятие математическое, тогда как система отсчета — физическая категория.
Итак, мы видим, что положение любой точки тела относительно выбранной системы отсчета однозначно определяется тройкой чисел , и . С другой стороны, легко видеть, что вместо этой тройки чисел положение той же точки тела можно определить, задав одно число — длину отрезка, соединяющего точку с началом координат, и указав направление этого отрезка из начала координат в выбранную точку тела. Такая величина,
количественная характеристика которой имеет не только числовое значение, но и направление, называется вектором. Строго
говоря, не всякую величину, характеризующуюся модулем и направлением, можно назвать вектором. Принципиально важным оказывается правило сложения векторов, которое должно удовлетворять известным условиям:
; ;
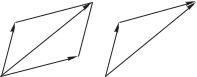
В трехмерном пространстве правила сложения векторов имеют вид, представленный на рис. 1.3. Из них, как мы вскоре увидим, прямо вытекает фундаментальный закон классической механики — преобразования Галилея. Алгебраическим операциям с векторами однозначно соответствуют точно такие же операции с их компонентами (проекциями):
; и т. д.
1.3 ] |
Системы отсчета. Радиус-вектор движущейся точки |
23 |
Существенность правил сложения иллюстрируется таким примером: величина, имеющая то же направление, что и вектор b,
но по модулю равная , этим |
|
|
||
правилам |
не удовлетворяет, а |
|
b |
|
значит, и вектором именовать- |
|
b |
||
ся не может. Истинный вектор |
b |
|||
+ |
+ |
|||
a |
a |
|||
должен к тому же вполне опре- |
a |
a |
||
b |
|
|||
деленным |
образом |
вести се- |
|
|
|
|
|||
бя при преобразовании системы |
à |
á |
||
координат. Наконец, для векто- |
|
Рис. 1.3 |
||
ров определены известные опе- |
|
|||
|
|
|||
рации скалярного |
произведения |
(или |
), векторного |
|
произведения (или ), смешанного произведения . Таким образом, утверждение о том, что некоторая величина есть вектор, будет достаточно сильным, и достаточно много говорящим о ее физических свойствах. Вектором (векторной величиной) определяется не только положение какой-либо точки в пространстве, но и многие другие важные величины, используемые для описания явлений природы, такие как, например, скорость и сила, напряженность электрического поля и т. д. Для сравнения заметим, что такие физические величины, как длина, масса, энергия, температура, вполне определяются заданием числового значения величины, и их свойства не связываются в нашем сознании с каким-либо направлением в пространстве (в отличие
от векторных величин их называют скалярными величинами или скалярами). Что касается вектора, задающего положение любой
точки движущегося тела в заранее выбранной системе координат, то такой вектор принято называть радиусом-вектором рас-
сматриваемой точки, а декартовы координаты точки , , являются проекциями этого вектора на соответствующие координатные оси, однозначно определяющими как длину, так и направление этого радиуса-вектора. Обычно радиус-вектор обозначают
буквой r, (либо той же буквой со стрелкой сверху ). Длину любого вектора называют его модулем и обозначают обыкно-
венной, не жирной буквой (без стрелки сверху), так что модуль радиуса-вектора обозначается, как . Модуль любого вектора — скаляр, по определению всегда положительный: .
При движении тела его различные точки изменяют с течением времени свое положение в пространстве и, соответственно, изменяются со временем их радиусы-векторы, то есть радиусвектор r в общем случае является функцией времени , ,
которая полностью определяется зависимостью от времени трех его проекций , и в заданной системе отсчета. Мы
сделали первый важный шаг на пути привлечения математики для описания движения тел, показав, что положение любой
24 |
Пространство. Время. Движение |
[ Гл. 1 |
точки тела в пространстве определяется векторной величиной — радиусом-вектором , который изменяется по величине и направлению вместе с изменением со временем положений точек движущегося тела. Это сразу позволяет нам объединить словесное, зачастую недостаточно четкое описание механических явлений со строгим, единым для всех языком математики. В частности, утверждение, что «движение тела это есть его перемещение в пространстве относительно других тел с течением времени», является, как мы видим, утверждением, что «движение тела — это изменение со временем радиусов-векторов всех точек рас-
сматриваемого тела в выбранной системе отсчета».
Итак, мы можем сказать, что основная задача механики состоит в нахождении математических соотношений, определяющих, как радиусы-векторы различных точек движущихся тел меняются со временем.
Умение находить эту временную´ зависимость решает одну из главных практических задач — предсказать, как будут двигаться тела в зависимости от возможных начальных условий. Графически изменение со временем радиуса-вектора любой точки можно
изобразить в виде линии, вдоль которой перемещается конец радиуса-вектора. Эта линия и является траекторией движения
соответствующей точки.
1.4. Частицы и поля. Классическая механика Ньютона
Принципиальным для классической механики является понятие материальной точки. По сути вся механика строится на
основании законов движения материальной точки, постепенно усложняясь и переходя к рассмотрению все более сложных объектов — и так вплоть до механики жидкости и газа.
Первоначальное понятие материальной точки базируется на системах координат, которые обсуждались в предыдущем параграфе. Это означает, что физическое тело рассматривается в качестве материальной точки, если для описания его движения достаточно временн´ой зависимости трех координат или, что то же, одного радиуса-вектора . Прежде всего, это соответствует телу пренебрежимо малых размеров — отсюда и термин. Но так же можно описывать перемещение тел совершенно произвольных размеров и формы, если они совершают поступательное движение, т. е. траектории всех точек тела идентичны и могут быть совмещены параллельным переносом. Наконец, и при более сложных движениях, когда существенны ориентационные координаты, движение центра масс тела, как мы увидим в последующих главах, подчиняется законам механики материальной точки.
1.4 ] |
Частицы и поля. Классическая механика Ньютона |
25 |
Механика Ньютона называется классической потому, что ее становление произошло задолго до утверждения современных атомистических представлений о строении вещества. Как уже говорилось, любое количественное соотношение (а значит — и любая область физики, представляемая некоторой совокупностью количественных соотношений) имеет смысл лишь при указании границ применимости. Таким образом, в современном понимании термин «классическая механика» должен быть определен количественно, а именно: должны быть сформулированы условия, при которых ее можно использовать с заданной точностью и/или оценена максимальная возможная ошибка.
Во-первых, сложение движений в рамках классической механики сводится к сложению радиусов-векторов. Если материальная точка в некоторой системе отсчета перемещается по закону1 , а сама система отсчета движется так, что ее начало координат в некоторой новой системе перемещается по закону 2 , то в этой новой системе отсчета материальная точка движется по закону 1 2 . Это эквивалентно преобразованиям Галилея, о которых мы будем говорить в следующем параграфе. Сколь ни естественным выглядит это правило, уже в XX в., почти через 200 лет после смерти Ньютона было установлено (прежде всего здесь следует назвать имя выдающегося физика-теоретика Альберта Эйнштейна (1879–1955)), что оно представляет собой лишь частный случай, приближение, отвечающее пределу нерелятивистских скоростей 3 108 м/с. Механика тел, движущихся с относительными скоростями, сравнимыми со скоростью света , выглядит заметно сложнее и в гораздо меньшей степени согласуется с нашим здравым смыслом, поскольку
опыта с такими движениями человек в повседневной практике не имеет. Эта механика называется релятивистской; иногда ее по традиции называют специальной теорией относительности.
Мы с ней познакомимся в одной из последующих глав данного раздела.
Во-вторых, существенной ревизии подвергается механика Ньютона при переходе к рассмотрению физики молекул, атомов и элементарных частиц. И это обстоятельство было понято в XX в. усилиями датского физика-теоретика Нильса Бора (1885–1962), немецкого физика-теоретика Вернера Гейзенберга (1901–1976) и многих других замечательных ученых. Механика микромира — квантовая механика — не может использовать понятие материальной точки, поскольку все частицы, как оказывается, обладают волновыми свойствами. Пренебречь этим обстоятельством позволительно лишь до тех пор, пока реальные размеры тел, рассматриваемых нами как материальные точки, или расстояния между телами, другими словами, пространственные

26 Пространство. Время. Движение [ Гл. 1
масштабы задачи, существенно превышают т. н. длину волны де Бройля (1892–1987):
Б ,
где — масса тела, — его скорость, а 6,6 10 34 Дж с — постоянная Планка. Квантовая механика необходима уже для ответа на вопрос, что такое валентность с точки зрения физики или, например, что такое твердое тело и как оно устроено. С этой наукой наше знакомство состоится в заключительных разделах нашего курса.
Можно сказать, что механика Ньютона корректна в случае предельного перехода 0 и одновременно 0. Но этот предельный случай вмещает такое многообразие предметов и явлений и столь важен с практической точки зрения, что классическая механика и на сегодняшний день остается не только предметом утилитарного применения, но и живой, развивающейся областью естествознания.
Подавляющая часть объектов окружающего мира, в особенности доступных непосредственному человеческому восприятию (с помощью органов чувств), состоит из мельчайших частичек
вещества — атомов. В дальнейшем мы будем называть их частицами, поскольку структура атомов и законы их «внутренней
жизни» не могут быть предметом рассмотрения классической механики. Частицами называют также обычно и входящие в состав атомов электроны, атомные ядра, протоны, нейтроны и множество других, так называемых, элементарных частиц, о которых будет идти речь в соответствующем разделе курса общей физики. Наконец, физики используют понятие макрочастиц, состоящих из большого числа атомов. В рамках классической механики частицей можно называть любой физический объект, который с достаточной точностью описывается приближением материальной точки.
Но окружающий нас мир состоит не только из атомов. Так например, иначе устроены электромагнитные волны, пронизывающие окружающее нас пространство и почти непрестанно воздействующие на наши органы чувств либо как видимый свет, либо как радиоволны или телевизионные сигналы. (Более того, по сути все наши органы чувств, а равно и все наши измерительные приборы воспринимают окружающий мир через электромагнитное взаимодействие). Электромагнитные волны представляют собой электрические и магнитные поля — особый вид объектов природы, отличных от частиц. Опыт показывает, что все, что нас окружает, есть либо частицы, либо поля, либо структуры, объединяющие частицы и поля, и все они могут совершать движение друг относительно друга. Заметим, однако, что в релятивистской квантовой физике принципиальная разница между частицей и
1.5 ] |
Вопросы |
27 |
полем исчезает (иногда говорят, что частица есть квант соответствующего поля).
В классической и даже релятивистской (но не квантовой) физике понятия частицы и поля разграничены. Движение частиц или их ансамблей — макроскопических тел — оказывается главным предметом рассмотрения, тогда как полем обусловлено взаимодействие частиц. В том случае, когда источники поля остаются за рамками механической задачи, рассматривается движение в заданном поле, если же исследуется движение замкнутой системы как результат действия полей, ею же порожденных, то задача называется самосогласованной.
Поля, известные физике на сегодняшний день, бывают четырех видов и, соответственно, представляют четыре типа взаимодействия. Мы с детства знакомы с силой тяжести и в какой-то мере умеем измерять ее. Самое естественное понятие о массе следует из измерения веса тел. Это дает нам понятие о гравитационном взаимодействии. Очень многие хрестоматийные задачи механики рассматривают поведение частицы или системы частиц в гравитационном поле.
Столь же универсальным в окружающем нас мире оказывается электромагнитное взаимодействие; как уже отмечалось, вся наша связь и взаимодействие с внешним миром именно этим взаимодействием обусловлены. Это, правда, лишь в XX в. было понято должным образом. Подобно гравитационному, электромагнитное взаимодействие не ограничено расстоянием, что и отражает, в сущности, поэтический штамп «свет далекой звезды».
Еще два типа полей и взаимодействий — сильное и слабое — напротив, ограничены радиусом действия, и притом столь малым, что рассматривать их можно только в рамках квантовой физики. В нашем курсе мы рассмотрим их во втором томе применительно к физике ядра и элементарных частиц. Классическая механика с этими полями дела иметь не может.
Теперь, наконец, мы можем определить содержание данного раздела нашей книги. В ней рассказывется о законах движения макроскопических тел при скоростях и пространственных
масштабах, примерно соответствующих нашему повседневнеому
опыту. Наука, которая изучает относительное движение таких тел, называется классической механикой.
Вопросы
1.Каковы основные физические свойства нашего пространства?
2.Чему равна сумма углов треугольника, изображенного на рис. 1.2, включающего в себя четверть верхней полусферической поверхности?
3.Что такое часы?
4.Является ли проекция векторной величины на одну из координатных осей ( , , ) скалярной величиной?
Г л а в а 2
ВВЕДЕНИЕ В КИНЕМАТИКУ
2.1. Кинематика материальной точки
Кинематикой называется раздел механики, в котором изучаются самые общие характеристики движения, не зависящие от характера взаимодействия между телами. Существует следующее простое определение кинематики: геометрия движения.
В классической и релятивистской механике кинематика оказывается различной. Кинематика движения тела конечных размеров сложнее, чем кинематика точки, хотя в классической механике она и сводится к последней. Темой данного параграфа будет нерелятивистская кинематика материальной точки.
Фундаментальные кинематические понятия — скорость и ускорение. Из школьного курса физики читателю знакомы средняя скорость и среднее ускорение. Пусть материальная точка совершает одномерное перемещение, и пусть она сместилась на расстояние за промежуток времени . Тогда, по определению, средняя скорость есть
|
|
|
(2.1) |
|
|
|
|
Пусть, далее, средние скорости на двух последовательных участках пути, отстоящих друг от друга на , отличаются на величину . Среднее ускорение может быть определено как
|
(2.2) |
|
|
Естественным обобщением этих первичных определений оказываются понятия мгновенной скорости и ускорения:
|
|
, |
(2.3) |
|
0 |
|
|
|
|
|
(2.4) |
|
0 |
|
|
Заметим, что именно необходимость адекватного кинематического описания послужила Ньютону и Г. Лейбницу (1946–1716) стимулом для создания основ дифференциального и интегрального исчисления. Следующим естественным обобщением определений (2.3), (2.4) будет переход к неодномерному движению, которое, естественно, уже нельзя будет описать одной коорди-
2.1 ] Кинематика материальной точки 29
натой . В тех случаях, когда по условиям задачи движение тела можно заменить на движение материальной точки, его положение в пространстве определяется радиусом-вектором этой точки, который при движении меняется со временем, и нахождение закономерностей этого изменения и является основной задачей механики.
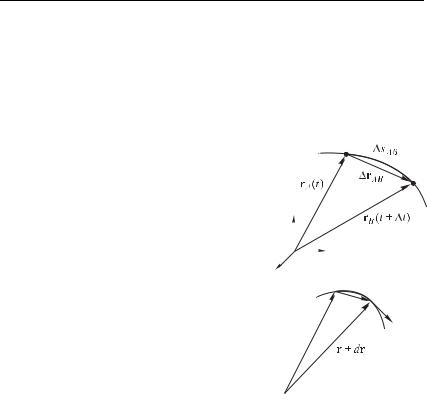
Пусть тело движется по криволинейной траектории (рис. 2.1 а). И пусть в момент времени оно оказалось в точке ,
положение |
которой относительно вы- |
|
|
A |
|
|||
бранной системы координат определя- |
|
|
|
|||||
|
|
|
|
|||||
ется радиусом-вектором |
. Через |
|
|
|
B |
|||
промежуток времени тело оказа- |
|
|
|
|||||
|
|
|
|
|||||
лось в точке с радиусом-вектором |
|
|
|
|
||||
. Расстояние вдоль траекто- |
z |
|
|
|
||||
рии между точками (например, между |
|
|
|
|
||||
точками и ) |
называется путем |
O |
|
|
à |
|||
, пройденным телом, а разность |
y |
|||||||
x |
|
|||||||
векторов |
|
называется |
|
|
|
|||
|
|
ds |
|
|||||
вектором перемещения тела из точ- |
|
|
|
|||||
|
|
|
|
|||||
ки в точку . Если нам известен |
|
|
dr |
v |
||||
закон движения тела по траектории, |
|
|
|
|||||
|
|
|
|
|||||
т. е. известна функция |
времени , |
|
r |
|
||||
то мы всегда сможем найти и длину |
|
|
|
|
||||
пути, скажем, из точки в точку , и |
|
|
|
|
||||
вектор перемещения |
(построив, |
|
|
|
á |
|||
например, |
траекторию |
графически). |
O |
|
|
|||
|
|
|
||||||
А чему же при этом равняется ско- |
|
|
Рис. 2.1 |
|
||||
рость тела, допустим, в точке ? Идея |
|
|
|
|
||||
определения скорости в точке в момент времени состоит
втом, чтобы выразить ее, как частное от деления перемещения из точки в соседнюю, близкую к ней точку траектории, на промежуток времени, которое затрачивает тело на это перемещение.
Таким образом, в трехмерном случае, то есть при движении
впространстве, естественно, изменяется не только величина, но и направление скорости. Поэтому скорость должна быть определена как предел отношения приращения вектора к промежут-
ку времени |
|
(2.5) |
|
||
|
0 |
|
Хотя определение скорости и содержит предел 0, но мы должны понимать, что в реальном опыте предел 0 все равно никогда не достижим, так как любое измерение осуществляется
всегда с некоторой ошибкой, как говорят, с конечной точностью. Более того, экспериментальное значение любой физической величины имеет смысл лишь постольку, поскольку указано, с какой точностью эта величина измерена. Поэтому для опыт-

30 |
Введение в кинематику |
[ Гл. 2 |
ного измерения скорости тела в какой-то точке его траектории необходимо с максимальной точностью измерить приращение за минимально возможный при заданной точности промежуток времени . Частное от деления этих величин и определяет экспериментальное значение скорости, а используемые при этом приборы и метод измерения определяют, с какой конкретно точностью известна скорость интересующего нас тела.
Определение скорости (2.5) можно выразить следующими словами: скорость материальной точки является производной ее радиуса-вектора по времени. Правила вычисления производ-
ных различных функций изучаются в соответствующих разделах математики. Для нас важно понимание того, что если нам известен закон движения тела по траектории (известна функция времени ), то мы по известным и простым математическим правилам сможем вычислить — значение скорости тела в любой точке этой траектории.
Какие свойства скорости как физического понятия особенно важны? Прежде всего, скорость является векторной величи-
ной и, следовательно, однозначно определяется, например, тремя своими проекциями на оси какой-либо декартовой системы координат. В такой системе координат указанные проекции , , определяются в соответствии с (2.5) как
, |
, |
, |
(2.6) |
|
|
|
|
где , , — проекции радиуса-вектора движущейся материальной точки на соответствующие оси координат.
Любой вектор можно определить, не только указав три его координаты в какой-либо системе отсчета, но и задав его направление и его модуль (длину). В пределе 0 бесконечно малое перемещение совпадает с бесконечно малым элементом
траектории, точнее, в этом пределе модуль совпадает с бесконечно малым изменением пути , направление d совпадает с направлением движения, которое определяется касательной к траектории в заданной точке (рис. 2.1 б), а модуль скорости равен производной пути по времени
Сучетом (2.6) модуль скорости можно представить также в виде
2 2 2
Когда при движении тела модуль скорости остается посто-
янным (равным, например, 0), то такое движение называют равномерным. Если при этом весь пройденный телом путь
представить как сумму элементарных перемещений , то из