

S
_
O V
O
Рис. 4.8
5. ОСНОВНЫЕ ЗАДАЧИ ДИНАМИКИ МАТЕРИАЛЬНОЙ ТОЧКИ. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ
5.1.Основные положения динамики. Аксиомы динамики
Вдинамике механическое движение рассматривается не только с точки зрения геометрических форм движения, но и выясняются факторы, вызывающие те или иные виды движений. Динамика изучает движение материальных тел под действием сил.
Воснове динамики лежат следующие аксиомы.
Аксиома 1 (принцип инерции). Всякая изолированная
материальная точка находится в состоянии покоя или равномерного и прямолинейного движения, пока приложенные силы не выведут ее из этого состояния.
Принцип инерции лежит в основе статики и динамики потому, что содержит в себе как аксиому инерции покоя (статика), так и аксиому инерции движения (динамика). Если на материальное тело (точку) не действуют никакие силы или
действует уравновешенная система сил (∑Fk=0, ∑Mo(F)=0), то относительно неподвижной (инерциальной ) системы отсчета скорость тела (точки) v=const. Но при v=0 имеем состояние
покоя, а при v≠0 (точка движется равномерно и прямолинейно)
– состояние динамического равновесия.
26
Только приложенная сила может вывести материальную точку из состояния инерции, но из кинематики известно, что начало движения материальной точки из состояния покоя либо нарушение ее прямолинейного или равномерного движения связано с возникновением ускорения. Аксиома 2 устанавливает зависимость между внешней силой, действующей на материальную точку, и возникшим вследствие этого ускорением.
Аксиома 2 (основной закон динамики). Ускорение ма-
териальной точки пропорционально действующей силе и направлено по линии, вдоль которой действует эта сила:
F=ma.
На все материальные тела вблизи Земли действует сила тяжести G, и при свободном падении на Землю тела любой массы m приобретают одно и тоже ускорение g, которое называется ускорением свободного падения. Для свободно падающего тела можно записать:
G=mg.
Сила тяжести тела в ньютонах равна произведению его массы на ускорение свободного падения.
Аксиома 3 (закон независимости действия сил). Если к материальной точке приложена система сил, то движение этой точки складывается из тех движений, которые точка могла бы иметь под действием каждой силы в отдельности.
Таким образом, при одновременном действии на материальную точку массой m, например, четырех сил (рис. 5.1) ускорение a , полученное точкой, можно определить, геометрически сложив ускорения a1, a2, a3, a4, возникшие под действием каждой силы в отдельности. В то же время ускорение a про-
порционально равнодействующей F∑ тех же сил:
F∑=ma,
где F∑=∑Fk и a=∑ak .
27
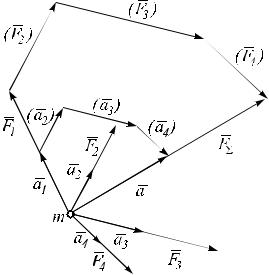
Рис. 5.1
Аксиома 4 (закон действия и противодействия). Две ма-
териальные точки действуют друг на друга с силами, равными по модулю и направленными в противоположные стороны.
Так как каждая сила приложена к своей точке, то силы взаимодействия между двумя материальными точками не уравновешивают друг друга. Каждая из этих сил сообщает ускорение той материальной точке, на которую действует, согласно аксиоме 2,. Все ускорения материальных точек относительно неподвижной системы отсчета есть результат взаимодействия материальных точек, а в общем случае – результат взаимодействия материальных тел.
Свободной называется материальная точка, движение которой в пространстве не ограничено наложенными связями.
В различных системах координат можно вывести дифференциальные уравнения движения материальной точки, используя основной закон динамики. Для несвободной точки можно получить дифференциальные уравнения движения так же, как и для свободной, если ко всем приложенным к точке силам, в соответствии с аксиомой о связях и силах реакций связей, добавить силы реакций связей.
28
5.2. Дифференциальные уравнения движения материальной точки
Если обозначить равнодействующую всех заданных сил
и сил реакций связей F, а массу точки |
m, получим |
F=ma. |
(5.1) |
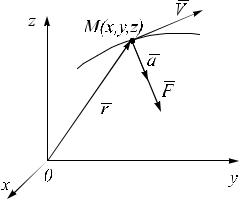
Если ускорение a выразить через радиус-вектор (рис. 5.2), получим
a=d2r/dt2.
Рис. 5.2
В векторной форме дифференциальное уравнение движения материальной точки имеет вид
md2r/dt2=F. (5.2)
Проецируя уравнение (5.1) или (5.2) на координатные оси, получим дифференциальные уравнения движения точки в проекциях на эти оси.
В декартовой системе координат:
max=Fx; may=Fy; maz=Fz.
Через вторые производные по времени от координат движущейся точки можно выразить проекции ускорения на координатные оси:
29