

Это выражение, определяющее степень свободы плоского механизма, выведено Чебышевым в 1869 году.
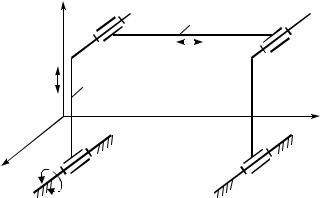
Применим его к рассматриваемому механизму: n=3, P5= 4, Р4=0, W=3×3–2×4=1,
т.е. необходимо также одно начальное звено. Выберем в его качестве звено АВ.
z |
B |
2 |
C |
|
|
|
|
|
1 |
|
|
|
|
|
y |
x |
|
|
|
|
А |
|
D |
Рис. 18.12
В соответствии с формулой Чебышева плоские механизмы могут содержать только пары 5-го и 4-го классов.
18.5. Пассивные связи и лишние степени свободы
Число степеней свободы и число условий связи определяет движение механизма. Но существуют степени свободы и условия связи, которые не влияют на характер движения звеньев. Такие степени свободы являются лишними, а условия связи – избыточными.
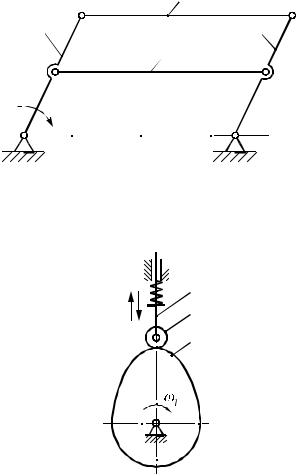
Рассмотрим механизм (рис. 18.13). Степень подвижности этой кинематической цепи W = 0. В действительности же это механизм. Звено BE создает избыточные связи, ставится оно в механизме исходя из конструктивных соображений; если же его удалить, характер движения остальных звеньев не изменится.
113
C |
2 |
D |
|||
|
|
||||
1 |
|
|
|
|
3 |
B |
4 |
E |
|||
|
|
||||
|
|
|
|
|
|
А |
|
|
|
|
F |
n=4; P5=6; W=3×4-2×6=0.
Рис. 18.13
Рассмотрим кулачковый механизм (рис. 18.14).
 0
0
2
3
1
n=3; P5=3; P4=1; W=3×3–2×3-1=2.
Рис. 18.14
W = 2. Нужны два ведущих звена? Нет. Одну лишнюю подвижность дает ролик (звено 3), он вращается вокруг своей оси и поднимается вместе с толкателем. Если профиль кулачка выполнить по эквидистантной кривой, то механизм примет вид, представленный на рис. 18.15.
114
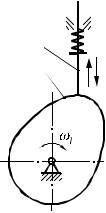
Следовательно, ролик, поставленный для уменьшения трения, дает лишнюю подвижность.

 0
0
2
1
n=2; P5=2; P4=1; W=3×2–2×2-1=1.
Рис. 18.15
Пассивные связи и лишние степени свободы могут быть выявлены при изучении кинематики механизмов. Так, если определение перемещений и скоростей можно произвести без участия отдельных звеньев, значит, они вносят либо избыточные связи, либо лишние степени свободы.
18.6. Замена в плоских механизмах высших кинематических пар низшими
В соответствии со структурной формулой Чебышева в плоские механизмы входят пары5-го и 4-го классов. Часто пары IV класса могут быть высшими. Отдельные методы теории механизмов и машин требуют замены высших пар звеньями, входящими только в низшие кинематические пары. При замене должны удовлетворяться следующие условия:
1)степень свободы должна остаться прежней;
2)характер движения звеньев не должен изменяться. Рассмотрим механизм из двух подвижных звеньев n = 2
(рис. 18.16).
115
Здесь две пары 5-го класса А и В и одна пара 4-го класса – высшая (точка контакта звеньев 1 и 2). Степень свободы данного механизма
W=3×2–2×2–1=1. |
|
|
|
|||
O1 |
|
|
3 |
O2 |
||
|
|
|
|
|||
|
1 |
2 |
|
|
|
|
A |
|
|
|
|
B |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 18.16
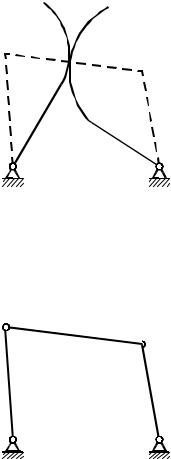
Покажем, что этот механизм может быть заменен шарнирным четырехзвенником (рис. 18.17).
Всякая высшая пара заменяется одним фиктивным звеном и двумя низшими кинематическими парами.
O1
 O2
O2
A B
W = 3×3-2×4=1.
Оба предъявляемые к нему требования выполняются. О1О2– фиктивное звено; AO1 О2 B – заменяющий механизм.
Рис. 18.17
116