

mX |
= P sinα − F |
−Ф cosα . |
(6.9) |
r |
m.c. |
e |
|
Для определения нормальной реакции N боковой грани призмы составим дифференциальное уравнение относительного движения груза в проекции на ось Y:
MΫr=N – Pcosα – Фesinα .
Так как Ϋr=0, получим
|
sinα |
|
(6.10) |
|
|
||
N = P cosα + ae |
g |
. |
|
|
|
|
Искомое давление груза на боковую грань призмы направлено противоположно N и равно ей по модулю. Подставив в уравнение (6.9) значение N из формулы (6.10), получим искомое относительное ускорение
X r = g(sinα − f cosα)− ae (cosα + f sinα).
7. ДИНАМИКА ТВЕРДОГО ТЕЛА
7.1. Понятие о механической системе
Механической системой называется совокупность материальных точек, связанных между собой силами взаимодей-
ствия. В механике любое материальное тело рассматривается как механическая система, образуемая совокупностью материальных точек. Неизменяемой механической системой называется абсолютно твердое тело, так как расстояния между материальными точками остаются неизменными. Механические системы называются изменяемыми, если расстояния между точками могут меняться. К ним относятся любые машины и механизмы.
Внешними называются силы, действующие на точки системы со стороны точек или тел, не входящих в эту систему, а силы, действующие на точки системы со стороны точек или тел этой же системы, называются внутренними.
37
Внешние силы обозначаются с индексом e: Fe, Re,, а внутренние силы – с индексом i: Fi.
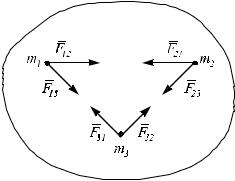
Внутренние силы взаимодействия между отдельными точками механической системы (рис. 7.1), согласно аксиоме динамики, попарно равны и направлены противоположно вдоль прямых, соединяющих эти точки, при этом главный вектор всех внутренних сил механической системы равен нулю. Причем, если рассматриваемая механическая система представляет собой абсолютно твердое тело, т.е. является неизменяемой, то внутренние силы уравновешиваются; если же рассматривается изменяемая механическая система, то внутренние силы взаимно не уравновешиваются, так как приложенные к разным телам они могут вызвать их взаимное перемещение.
Рис. 7.1
Движение механической системы зависит не только от действующих сил, оно зависит также, во-первых, от суммарной массы системы
m=∑∆mk , |
(7.1) |
где m – масса механической системы и ∆mk – массы ее отдельных точек, и, во-вторых, от положения центра масс системы.
Движение центра масс определяется уравнением
Fe∑=mac , |
(7.2) |
38
где Fe∑ − результирующая всех внешних сил, приложенных к точкам системы; m− масса системы и ac − ускорение центра масс системы. Центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и приложены все внешние силы. Используя уравнение (7.2) при решении задач, следует иметь в виду, что движение центра масс характеризует перемещение системы только при ее поступательном движении.
7.2. Принцип Даламбера
При рассмотрении движения несвободных систем используется специальный принцип, получивший название прин-
ципа Даламбера.
Уравнение движения материальной точки массой m относительно инерциальной системы отсчета под действием приложенных активных сил и реакций связей имеет вид
ma=F+R . (7.3)
Здесь обозначено: F – равнодействующая активных сил; R – равнодействующая реакций связей и a – ускорение точки относительно инерциальной системы отсчета. Силой инерции материальной точки называется произведение массы точки на вектор ускорения, взятое с обратным знаком, т.е. Ф=-ma. Тогда уравнение (7.3) примет вид
F+R+ Ф=0. |
(7.4) |
Так как силы F, R и Ф образуют систему сходящихся сил и удовлетворяют условию (7.4), то они являются системой сил, эквивалентной нулю:
{F,R,Ф} 0. |
(7.5) |
Уравнение (7.4) выражает принцип Даламбера для точки:
при движении материальной точки активные силы, реакции связей вместе с силой инерции точки образуют равновесную систему сил.
39
Рассмотрим систему N материальных точек. В общем случае к каждой точке системы приложена равнодействующая активных сил и равнодействующая реакций связей. Применяя принцип Даламбера к каждой точке системы, получим
Fk+Rk+Фk=0, (k=1,…,N). |
(7.6) |
N векторных условий (7.6) выражают принцип Даламбера для системы: при движении механической системы активная сила и реакция связей вместе с силой инерции составляют равновесную систему сил для каждой точки системы.
7.3. Уравнение динамики вращающегося тела
Пусть твердое тело (рис. 7.2) под действием внешних сил
Fek вращается вокруг оси OZ с угловым ускорением ε. Вращающим моментом называется алгебраическая сумма моментов всех сил (активных сил и сил сопротивления) относительно оси OZ Mez=∑Mz(Fek).
|
z |
|
ε |
_τ |
∆mk S |
∆Φk |
|
|
k |
_n |
|
∆Φk |
|
 Mez
Mez
O
Рис. 7.2
40
Установим зависимость между угловым ускорениемε тела и вращающим моментом Mez. Если рассматривать твердое тело как механическую систему, сможем разбить его на множество матери-
альных точек с массами ∆mk. При вращении тела каждая из этих точек движется по окружности радиусаρk с ускорениемak, которое разложим на касательноеakτ и нормальное akn ускорения.
На каждую материальную точку действуют элементарные силы инерции: касательная ∆Фkτ =–∆makτ и нормальная ∆Фkn =– ∆makn. Активные силы, силы реакций связей и силы инерции, согласно принципу Даламбера, образуют уравновешенную систему. В связи с этим алгебраическая сумма моментов всех этих сил относительно оси OZ должна быть равна нулю:
Mez−∑∆Фkτρk=0. (7.7)
(моменты сил ∆Фkn относительно оси OZ равны нулю, так как линии действия этих сил пересекают ось). Касательная сила
инерции ∆Фkτ=∆mkερk , где ε − угловое ускорение тела. Подставляя значение сил инерции в уравнение (7.7), получим
Mez=ε∑∆mkρk2.
Величина ∑∆mkρk2=Jz, равная сумме произведений масс точек на квадрат их расстояний от оси вращения, называется
моментом инерции тела (системы) относительно этой оси.
Введя в последнее равенство принятое обозначение, получим
основное уравнение динамики вращающегося тела:
Mez=Jzε . (7.8)
Момент инерции выражает меру инертности тела при вращательном движении. Выражению Jz можно придать интегральную форму:
Jz=∫vρk2dmk . (7.9)
Значение момента инерции, что следует из формулы (7.9), зависит главным образом от распределения массы тела относительно оси вращения (рис. 7.3).
41