


|
|
Fк |
|
|
A |
` |
|
_ |
|
||
l |
B |
||
Fк |
|||
d |
|
||
|
|
||
|
С |
|
|
|
Рис. 1.13 |
|
2. ПЛОСКАЯ СИСТЕМА СИЛ
Систему сил, приложенных к твердому телу, называют плоской тогда, когда линии действия сил лежат в одной плоскости.
Для любой системы сил (F1,F2,…,Fn) главный вектор R является векторной суммой этих сил:
R=∑Fi (i=1,n),
а главный момент Lo – суммой векторных моментов сил относительно центра приведения:
Lo=∑Mo(Fi) (I=1,n).
Основная теорема статики для плоской системы сил: лю-
бую плоскую систему сил можно в общем случае привести к главному вектору системы и паре сил, векторный момент которой равен главному моменту системы сил относительно точки, выбранной за центр приведения.
Равновесие плоской системы сил, действующих на твердое тело, обеспечивается тогда, когда суммы проекций сил на каждую из двух взаимно перпендикулярных осей координат, лежащих в плоскости действия сил, равнялись нулю и сумма алгебраических моментов этих сил относительно любой точки, лежащей в плоскости действия сил, также равнялась нулю.
14
2.1. Различные формы условий равновесия плоской системы сил
Форма 1:
∑Fix=0; ∑Fiy=0; ∑Mo(Fi)=0, (i=1,n).
Форма 2. Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, равнялись нулю, т.е.:
∑MA(Fi)=0; ∑MB(Fi)=0; ∑MC(Fi)=0, (i=1,n).
Форма 3. Для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух любых точек, лежащих в плоскости действия сил, равнялись нулю и алгебраическая сумма проекций этих сил на какую-либо ось плоскости, не перпендикулярную к прямой, проходящей через две моментные точки, также равнялась нулю, т.е.:
∑MA(Fi)=0; ∑MB(Fi)=0; ∑Fix=0, (i=1,n),
где за ось Ox принята любая прямая, не перпендикулярная к АВ.
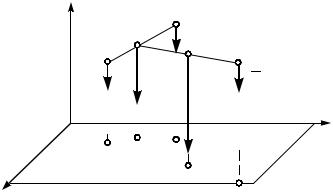
2.2. Центр параллельных сил
Представим, что к трем точкам А1,А2, и А3 твердого тела приложена пространственная система параллельных сил F1,F2,
и F3 (рисунок).
Складывая попарно силы, получим равнодействующую, которая проходит через точку С. Центром параллельных сил называется точка С, через которую проходит линия действия равнодействующей системы параллельных сил. Координаты центра параллельных сил определяются по формулам:
Xc=∑FkXk/∑Fk, Yc=∑FkYk/∑Fk, Zc=∑FkZk/∑Fk,
где Fk – модули параллельных сил, Xk, Yk, Zk – координаты точек их приложения.
15
z |
|
|
A2_ |
|
|
||
|
B |
|
|
|
|||
A |
|
|
|
F2 |
A3 |
||
_ 1 |
|
|
|
|
C |
||
|
|
|
|||||
|
|
|
|||||
F |
|
_ |
|
|
|
F |
|
|
|
|
|
||||
|
|
|
|
|
|||
1 |
|
F1-2 |
|
_ |
|
3 y |
|
|
|
|
|||||
|
|
|
|||||
|
|
|
|
||||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
FΣ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x
2.3. Центр тяжести.
Определение координат центра тяжести плоских фигур
Центр параллельных сил тяжести Gk всех частиц тела называется центром тяжести тела. Через центр тяжести С проходит линия действия равнодействующей сил тяжести
(G=∑Gk) при любом положении тела относительно поверхности Земли. Формулы для определения координат центра тяжести тела:
Xc=∑GkXk/∑Gk, Yc=∑GkYk/∑Gk, Zc=∑GkZk/∑Gk.
Если тело плоской формы составлено из плоских или изогнутых тонких однородных пластин, то сила тяжести каждого участка такой фигуры
где Ak – площадь участка;
p – сила тяжести единицы площади фигуры.
16