

16.3. Определение перемещений и напряжений при ударе
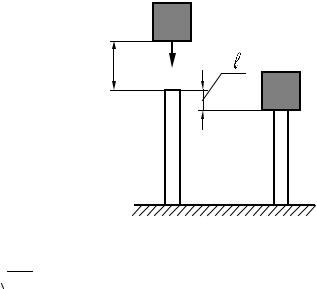
Рассмотрим случай продольного удара груза по неподвижному телу (рис. 16.6).
|
_ |
|
h |
G |
∆ d |
|
Рис. 16.6
Скорость тела в момент удара определяется по формуле
V = 
 2gh .
2gh .
Эта скорость упадет до 0 за короткий промежуток удара
(0,001–0,01 сек).
Благодаря большому замедлению возникает значительная сила инерции, которая и определяет действие удара.
Принимаются допущения:
1)напряжения при ударе не превосходят предела пропорциональности (закон Гука при ударе сохраняет свою силу);
2)тела после удара не отделяются друг от друга;
3)масса ударяемого стержня считается малой по сравнению с массой ударяющего тела, поэтому в расчет не принимается;
4)пренебрегаем потерей части энергии, перешедшей в теплоту
ив энергию колебательного движения соударяющихся тел. Приравняем к потенциальной энергии деформации стержня
работу падающего груза. Вес падающего груза совершает работу
W = G(h + ∆ d ), 92

где ∆ d – перемещение в точке удара, равное укорочению стержня. Потенциальная энергия деформации стержня при сжатии:
U = ∆ 2d EA/(2 ) .
Приравнивая, получим
G(h + ∆ d ) = ∆ 2d EA/(2 ) ,
или |
∆ 2d EA −G2 ∆ d |
−Gh2 = 0 , |
||||||
|
Деля на EA, получим |
|
|
|
|
|
||
|
∆ 2d − |
G |
2∆ d − |
|
G |
2h = 0 . |
||
|
|
|
|
|||||
|
|
EA |
|
|
EA |
|||
|
Укорочение стержня от приложенной статически нагрузкиG: |
|||||||
|
|
∆ st = |
G |
. |
||||
|
|
|
||||||
|
|
|
|
EA |
||||
|
Тогда |
|
|
|
|
|
||
|
∆ 2d − 2∆ st ∆ d |
− 2∆ st h = 0 . |
||||||
Решая это квадратное уравнение относительно ∆ d , получим
∆ d = ∆ st ± 
 ∆ 2st + 2h∆ st .
∆ 2st + 2h∆ st .
(Решение со знаком минус не учитываем, так как оно противоречит физическому смыслу задачи).
∆ d = ∆ st (1+ 
 1+ 2h / ∆ st ) = ∆ st Kd ,
1+ 2h / ∆ st ) = ∆ st Kd ,
где Kd – динамический коэффициент. На основании закона Гука имеем
σd = |
∆ d E |
= |
∆ st E Kd |
=σst (1+ |
|
)=σst Kd . |
1+ 2h / ∆ st |
||||||
|
|
|
|
|
|
|
Динамические напряжения тем меньше, чем больше статическая деформация ударяемого тела (при прочих равных условиях).
Для смягчения удара применяют прокладки (резиновые, пружинные).
93

Для случая поперечного (изгибающего) удара формулы имеют аналогичный вид, только вместо ∆ st следует принимать статиче-
ский прогиб балки в месте удара – vst и вместо ∆ d динамический прогиб – vd.
16.4.Частные случаи
1.Внезапное приложение нагрузки имеет место, если h = 0,
получим
∆ d = 2∆ st ; σd = 2σst .
2. Если статическая деформация ∆ st значительно меньше h,
то для определения динамического коэффициента получим приближенную формулу
|
|
|
|
|
2h |
|
. |
Kd =1+ 1+ |
2h |
= |
|
||||
|
|
||||||
|
|
∆ st |
∆ st |
||||
Пример. На стальную двутавровую балку № 27А пролетом 3 м падает груз G = 1 кН с высоты h = 0,1 м. Из таблиц сортамента момент инерции сечения Jx = 5500 · 10-8 м4 , момент сопротивления Wx
= 407 · 10-6 м3; Е = 2 · 105 Мпа; G = 1 кН = 1 10-3 МН. Определить максимальное напряжение и наибольший прогиб балки в ее поперечном сечении.
Решение. Вычисляем прогиб балки под грузом при статическом нагружении:
V |
= |
G 3 |
= |
1 103 33 |
|
= 0,0048 10−2 |
м = 0,0048 |
см. |
|
48EJ |
48 2 105 5500 |
10−8 |
|||||||
st |
|
|
|
|
|
Динамический коэффициент
Kd =1+ 
 1+ 2h / ∆ st =1+
1+ 2h / ∆ st =1+ 
 1+ 2 10 / 0,0048 = 64 .
1+ 2 10 / 0,0048 = 64 .
Эффект падающего груза в 64 раза превосходит его статический эффект.
Статическое напряжение от груза G определим по наибольшему изгибающему моменту в среднем сечении балки:
M = G4 = 143 = 0,75 кН м. 94