

8) возможность использования широкой номенклатуры материалов.
Недостатки передач:
1)сложность изготовления;
2)наличие шума во время работы;
3)не предохраняют детали машины от поломок во время перегрузок.
Зубчатая передача состоит из 2-х колес, имеющих чередующие зубья и впадины. Меньшее из двух сцепляющихся колес называется шестерней, а большее – колесом. Параметры шестер-
ни сопровождаются индексом “1”, а колеса– “2”. Наиболее распространенными являются передачи с эвольвентным профилем зуба. Эвольвентное зацепление обладает технологическими достоинствами. Зубчатые передачи находят широкое применение в различных отраслях промышленности: автотракторостроении, станкостроении, самолетостроении, энергетическом машиностроении и др. для передачи усилий от весьма малых значений до 100 000 кВт. Размеры зубчатого колеса могут быть от нескольких миллиметров до нескольких метров (12 м и более).
22.2. Механизмы с высшими парами
22.2.1. Зубчатые передачи
Для того чтобы исключить проскальзывание и увеличить передаваемую мощность, используют зубчатые передачи. Они очень широко применяются в технике, их изучает наука, называемая теорией зубчатого зацепления.
Для того чтобы передаточное отношение было постоянным, необходимо, чтобы профили зубьев удовлетворяли некоторым условиям.
Пусть два звена, вращающиеся вокруг осей О1 и О2, образуют в точкеК высшую кинематическую пару (рис. 22.1).
Очевидно, что относительная скорость должна лежать на ка-
сательной τ-τ к сопряженным профилям, т.к. в противном случае нормальная составляющая относительной скорости привела бы
154
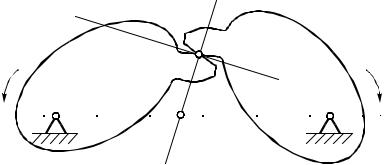
либо к отрыву звеньев друг от друга, либо к внедрению одного звена в другое. Из этого следует, что мгновенный центр скоростей в относительном движении лежит на нормалиn-n, проведенной в точке контакта к сопряженным профилям. В то же время мгновенный центр скоростей должен лежать на прямойО1О2, соединяющей оси вращения звеньев 1 и 2. Следовательно, мгновенным центром скоростей в относительном движении является точка Р, лежащая на пересечении нормалиn-n и линии О1О2. В теории зубчатого зацепления эту точку называютполюсом зацепления.
|
|
|
|
|
τ |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
. |
|
|||||||
q. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
||
|
|
|
|
|
|
|
|
|
|
|
|
τ |
||||||||
|
|
|
O |
|
|
|
|
|
|
|
|
|
O2 |
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
||
n
Рис. 22.1
Из определения мгновенного центра скоростей следует, что относительная скорость в точке Р равна нулю, т.е.
VP1 = VP2.
Следовательно,
q O1P = ϕ O2 P . |
(22.1) |
|
|
|
|
Отсюда передаточное отношение i12:
|
|
|
|
|
|
i |
= |
q |
= O2 P . |
(22.2) |
|
|
|||||
12 |
|
O1P |
|
||
|
|
ϕ |
|
Иными словами, нормаль, проведенная в точке контакта к сопряженным профилям, делит межосевое расстояние в отношении, обратно пропорциональном отношению угловых скоро-
стей. Это – основная теорема зацепления. Для того чтобы пере-
155
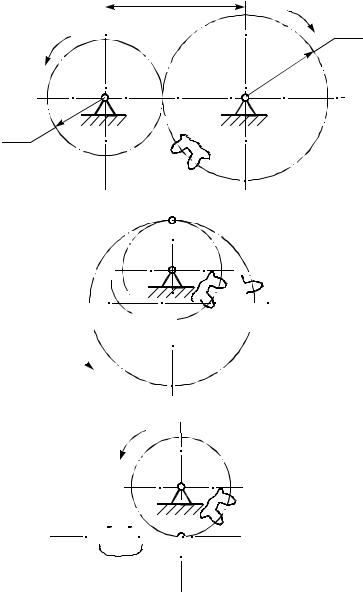
даточное отношение i12 было постоянным, необходимо, чтобы полюс зацепления занимал постоянное положение. В этом случае центроидами в относительном движении будут являться окружности, которые в теории зубчатого зацепления называются начальными окружностями. Все размеры, относящиеся к начальным окружностям, помечают индексомw, например: rw1, rw2
– радиусы начальных окружностей (рис. 22.2, а).
Радиусу начальной окружности rw пропорциональна длина начальной окружности и, следовательно, число зубьев z, которое может на ней разместиться. Поэтому для передаточного отношения справедливо выражение
|
|
|
|
|
|
|
i |
= |
q |
= − |
z2 |
. |
(22.3) |
|
|
|||||
12 |
|
|
z1 |
|
||
|
|
ϕ |
|
|
||
Знак «минус», стоящий перед отношением чисел зубьев ведомого и ведущего колеса, показывает, что в передачевнешнего зацепления ведущее и ведомое колеса вращаются в противоположные стороны, а передаточное отношение –отрицательное.
Расстояние между осями вращения зубчатых колес называют межосевым расстоянием и обозначают аw. В случае внешнего зацепления
аw = rw1 + rw2. |
(22.4) |
Учитывая, что rw1 = O1P, rw2 = O2P, из (22.2) и (22.4) получим
r |
= |
|
aw |
|
,r |
= |
awi12 |
. |
(22.5) |
|
|
|
|
||||||||
w1 |
|
i |
|
+1 |
w2 |
|
i +1 |
|
||
|
|
12 |
|
|
|
|
12 |
|
|
|
Для того чтобы уменьшить габариты передачи, используют колеса внутреннего зацепления: одно колесо вставляется внутрь другого (рис. 22.2, б). В этом случае направление вращения ведущего и ведомого колес совпадает, поэтому передаточное отношение – положительное:
|
|
|
|
z2 |
|
|
i |
= |
q |
= |
. |
(22.6) |
|
|
|
|||||
12 |
|
|
z1 |
|
||
|
|
ϕ |
|
|
||
|
|
|
156 |
|
||
a |
w |
. |
q. |
ϕ |
|
|
rw2 |
O1 |
O2 |
rw1 |
|
a
 P
P
O1
ϕ. 
 q.
q. 

 O2
O2

q. б
O1
_ 


 P V
P V
Q
в
Рис. 22.2
157
Межосевое расстояние равно разности радиусов начальных окружностей:
аw = rw2 – rw1.
Тогда радиусы начальных окружностей равны
r |
= |
aw |
, |
r |
= |
awi12 |
. |
|
|
||||||
w1 |
|
i12 −1 |
w2 |
|
i12 −1 |
||
|
|
|
|
||||
(22.7)
(22.8)
Если rw2 → ∞, то начальная окружность превращается в начальную прямую, а зубчатое колесо – в зубчатую рейку. В
этом случае получают зубчато-реечную передачу (рис. 22.2, в).
Поскольку в полюсе зацепления относительная скорость равна 0, то VP1 = VP2, тогда
|
|
|
|
1 |
|
|
i |
= |
q |
= |
. |
(22.9) |
|
|
|
|||||
12 |
V |
|
r1 |
|
||
|
|
|
||||
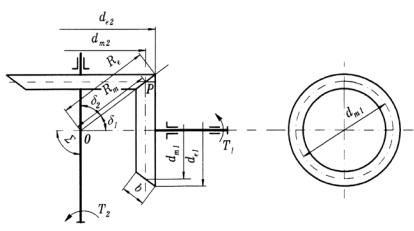
Для передачи вращения между валами с пересекающимися осями используют конические колеса (рис. 22.3). Чаще всего
угол между осями δ1 + δ2 = 900 (такие передачи называют ортогональными), но возможны и другие углы.
Рис. 22.3
158
В передачах с коническими колесами существует мгновенная ось (OP) – геометрическое место точек тел, имеющих в данный момент нулевую относительную скорость. Если мгновенную ось ОР, наклоненную к оси вращения шестерни под
углом δ1, вращать вокруг оси 1, получится коническая поверхность – подвижная аксоида (поверхность, образованная мгновенной осью в локальной системе координат, связанной со звеном 1 или 2, называют подвижной аксоидой). Аналогично при вращении мгновенной оси ОР вокруг оси 2 получим кониче-
скую поверхность с половиной угла при вершине равной δ2 (вторая подвижная аксоида). Подвижные аксоиды в теории зубчатых зацеплений называются начальными конусами. Зубья колес располагают вблизи начальных конусов, а поверхности вершин и впадин имеют ту же форму, что и начальные конусы.
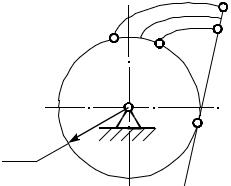
В качестве главного профиля зубьев цилиндрических зубчатых колес, применяемых в машиностроении, наибольшее распространение получил эвольвентный профиль. Плоская эвольвента окружности представляет собой траекторию любой точки прямой линии, перекатываемой без скольжения по эволюте, т.е. по основной окружности радиуса rb (рис. 22.4).
Прямая линия, перекатываемая по основной окружности,
называется производящей прямой.
q. K |
K |
0 |
D |
O |
D0 |
|
|
rb |
C |
|
Рис. 22.4
159