

22.3. Зубчатые механизмы с подвижными осями
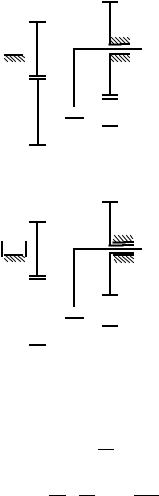
Планетарные
z4



 z1
z1
z2  z3
z3
Рис. 22.9
Дифференциальные
z4
 z1
z1
z2 

 z3
z3
Рис. 22.10
Передаточное отношение для последовательного ряда зубчатых колес и ступенчатых передач:
U1n = (−1)k
U1n = (−1)k z2 × z4 z1 z3
zn ; z1
× × zn , zn−1
где k – число пар колес внешнего зацепления.
В планетарных и дифференциальных механизмах движение может передаваться от центральных колеск водилу и от водила к колесам. Для вычисления передаточных отношений таких меха-
164

низмов используют метод инверсии (обращенного движения). При этом рассматривают движение всех колес относительно водила, тогда угловая скорость водила будет равна нулю, угловые скорости колес станут меньше действительных (абсолютных) на величину угловой скорости водила (рис. 22.11).
z4



 z1
z1
z2 



 z3
z3
Рис. 22.11
Полученный механизм (обращенный механизм) представляет ступенчатую передачу, передаточное отношение которой
U14(H ) = |
ω1 −ωH . |
|
ω4 −ωH |
Из последней формулы можно определить передаточное отношение для планетарного механизма (ω4 =0):
U14(H ) = ω−1 −ωωH =1−U1(H4) .
H
Передаточное отношение планетарного механизма при ведущем водиле
UH(41) = U1(4) ,
1H
где U1(H4) – передаточное отношение при ведущем центральном колесе 1.
165
22.4. Расчет основных геометрических параметров цилиндрических прямозубых колес
Эвольвентное зацепление двух зубчатых колес характеризуется следующим параметрами (ГОСТ 16530-70) (рис.
22.12).
Начальные окружности (dw1 и dw2) – воображаемые ок-
ружности, которые в процессе работы передачи перекатываются одна по другой без скольжения. Начальные окружности появляются у зубчатых колес в собранной передаче. Для отдельно взятого колеса понятие начальной окружности отсутствует. Оно имеет делительную окружность.
Окружность вершин зубьев (dα) – окружность, ограничи-
вающая головки зубьев.
Окружность впадин (df) – окружность, проходящая через основания впадин зубьев.
Основная окружность (db1 и db2) – окружность, при раз-
вертке которой получается эвольвента.
Делительная окружность (d1 и d2) – окружность зубчато-
го колеса, по которой обкатывается делительная окружность (прямая) инструмента в процессе нарезания зубьев. Делительная окружность колеса является начальной только в процессе изготовления (нарезания) зубьев. У некорригированных колес и при высотной коррекции начальные и делительные окружности совпадают.
Полюс зацепления (точка “P”) – точка касания начальных окружностей.
Окружной шаг зацепления (Pt) – расстояние между одно-
именными профилями, измеренное по дуге делительной окружности, зубчатого колеса.
Головка зуба (hα) – часть зуба между делительной окружностью зубчатого колеса и его окружностью вершин зубьев.
Ножка зуба (hf) – часть зуба между делительной окружностью и его окружностью впадин.
166

Рис. 22.12. Элементы зубчатого зацепления
Высота зуба (h) равна сумме высот головки и ножки зуба. Дуга зацепления (l) – путь по начальной окружности, проходимой точкой профиля за время зацепления пары сопряжен-
ных зубьев.
Коэффициент перекрытия (ε) – отношение дуги зацеп-
ления к окружному шагу.
167
Линия зацепления (N1 и N2) – линия, по которой перемещается точка касания зубьев. Линия зацепления проходит через полюс зацепления и является касательной к основным окружностям.
Угол зацепления (αw) – угол между линией зацепления и касательной к начальным окружностям в полюсе зацепления.
Модуль зацепления (m). Все модули стандартизованы в пределах от 0,05 мм до 100 мм.
Рассмотренные параметры составляют определенные кинематические зависимости. В табл. 3 приводятся основные соотношения для цилиндрических некорригированных зубчатых передач внешнего зацепления.
Врасчётах зуб зубчатого колеса рассматривают как балку,
защемленную одним концом и нагруженную силой (Qn). Такое положение нагрузки принимается как наиболее опасное.
Наиболее опасное сечение, где наиболее вероятен излом зуба, находится у его корня в зоне наибольшей концентрации напряжений. Максимальное напряжение возникает на стороне сжатия (нерабочая сторона). Однако следует отметить то, что расчет на прочность необходимо производить по напряжению на рабочей стороне, т.к. на этой растянутой стороне зуба здесь может образоваться усталостная трещина.
Если прямозубые цилиндрические колеса применяют преимущественно при невысоких и средних окружных скоростях (5–20 м/с) в пл анетарных, открытых передачах, а также при необходимости осевого перемещения колес для переключения скоростей (коробки передач), то косозубые колеса применяют для ответственных передач при средних и высоких скоростях (8–30 м/с).
Вотличие от прямозубых, косозубые передачи должны проектироваться так, чтобы в зацеплении находилось постоянно минимум две пары зубьев. Для этого необходимо, чтобы ширина колес
(b) была больше осевого шага (t0). При несоблюдении этого условия передача будет работать как прямозубая.
168
Таблица 3
Основные соотношения для цилиндрических некорригированных зубчатых передач внешнего зацепления
Параметры зацепления |
|
|
|
Формулы |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окружной модуль |
|
|
|
|
mt |
= |
|
Pt |
|
|
|
||||
|
|
|
|
|
π |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
Нормальный модуль |
|
|
|
mn = mt |
cos β |
||||||||||
Нормальный шаг |
|
|
|
Pn |
= Pt |
cos β |
|||||||||
Межосевое расстояние |
αw = |
(z1 + z2 )mn |
|
= 0,5(z1 + z2 )mt |
|||||||||||
|
|||||||||||||||
|
|
2cos β |
|
|
|
|
|
|
|
|
|
|
|||
Высота головки зуба |
|
|
|
|
ha = mn |
||||||||||
Высота ножки зуба |
|
|
|
hf |
=1,25mn |
||||||||||
Высота зуба |
|
|
|
h = 2,25mn |
|||||||||||
Радиальный зазор |
|
|
|
C = 0,25mn |
|||||||||||
|
|
d |
= m z |
|
|
= |
|
mn z1 |
|
|
|||||
|
|
|
|
|
|
||||||||||
|
|
|
1 |
|
t |
1 |
|
|
|
cos β |
|||||
Делительный диаметр |
|
|
|
|
|
|
|
|
|
|
|||||
|
d |
|
= m z |
|
|
= |
mn z2 |
|
|||||||
|
|
2 |
2 |
|
|
||||||||||
|
|
|
|
||||||||||||
|
|
|
|
t |
|
|
|
|
|
cos β |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Начальный диаметр |
|
|
|
dw |
|
= d1 |
|||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dw |
|
= d2 |
||||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Диаметр основной ок- |
|
db = dw cosαw |
|||||||||||||
ружности |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Диаметр вершин зубьев |
|
|
dа |
= d1 + 2mn |
|||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
dа2 |
= d2 + 2mn |
|||||||||||||
|
|
||||||||||||||
Диаметр впадин |
|
d f = d1 −2mn −2C |
|||||||||||||
|
d f = d2 −2mn −2C |
||||||||||||||
|
|
||||||||||||||
Коэффициент перекрытия |
|
|
|
|
ε = |
α |
|||||||||
|
|
|
|
|
|
|
|
|
P |
||||||
169
При значительной ширине колеса и большом угле наклона зубьев в зацеплении может быть одновременно до десяти и больше пар зубьев. Зубья косозубых передач входят в зацепление постепенно: контакт начинается в точке, по мере поворота колес контактная линия растет, некоторое время остается постоянной длины и далее постепенно сокращается до нуля. На боковых поверхностях зубьев контактные линии занимают наклонное положение.
Рис. 22.13. Цилиндрические колеса: а) косозубые; б) шевронные
В большинстве конструкций угол наклона зубьев β принимают от 8˚ до 18˚ (редко до 25˚) с тем, чтобы обеспечить осевой коэффициент перекрытия в пределах не менее 1,1-1,2.
Точное значение угла β выбирают таким, чтобы при стандартных значениях нормальных модулей межосевое расстояние aw соответствовало стандартам.
Работа косозубой передачи связана с действием на опоры осевых нагрузок, поэтому в мощных редукторах применяют передачи, не передающие на опоры осевых нагрузок. Шевронные колеса представляют собой соединенные вместе два косозубых колеса с одинаковым, но противоположно направленным наклоном зубьев и имеют угол наклона зубьев в пределах
β = 25–40˚.
170